Se um robô estiver sendo usado para coletar dados em ambientes aquáticos sensíveis, ele não deve ter uma hélice que possa prejudicar a vida selvagem ou ser pega em ervas daninhas. Um novo bot aborda esse problema utilizando um mecanismo de natação inspirado em minhocas.
Embora as minhocas marinhas geralmente permaneçam no fundo do mar, elas podem nadar através de águas abertas ondulando seus corpos finos e planos. Uma série de ondas viajantes começa na frente do corpo do verme e rola para trás, impulsionando -o para a frente.
Os cientistas da Universidade EPFL da Suíça agora copiaram essa ação em um pequeno robô sem mourethe que pode se mover em qualquer direção da superfície da água. O dispositivo movido a bateria pesa apenas 6 gramas e mede 45 mm de comprimento por 55 mm de largura.
Seu sistema de propulsão incorpora duas membranas de borracha macias e flexíveis e de 6 mm de espessura que servem como barbatanas peitorais. Cada uma dessas barbatanas está conectada ao seu próprio atuador eletro -hidráulico, que gera ondas que viajam pela membrana. Um sistema de controle eletrônico a bordo fornece até 500 volts para cada um desses atuadores com uma potência de apenas 500 miliwatts.
Utilizando essa configuração, o robô é capaz de percorrer a superfície em velocidades de até 12 cm (4,7 pol.) Por segundo. Na verdade, melhora o mecanismo da minhoca plana, pois suas barbatanas ondulam 10 vezes mais rápido que o corpo do verme. E além do mais, além de poder viajar para a frente e virar para ambos os lados, o robô também pode se mover de lado ou para trás se mais dois atuadores estiverem instalados. Além disso, afirma -se não produzir nenhum ruído do motor.
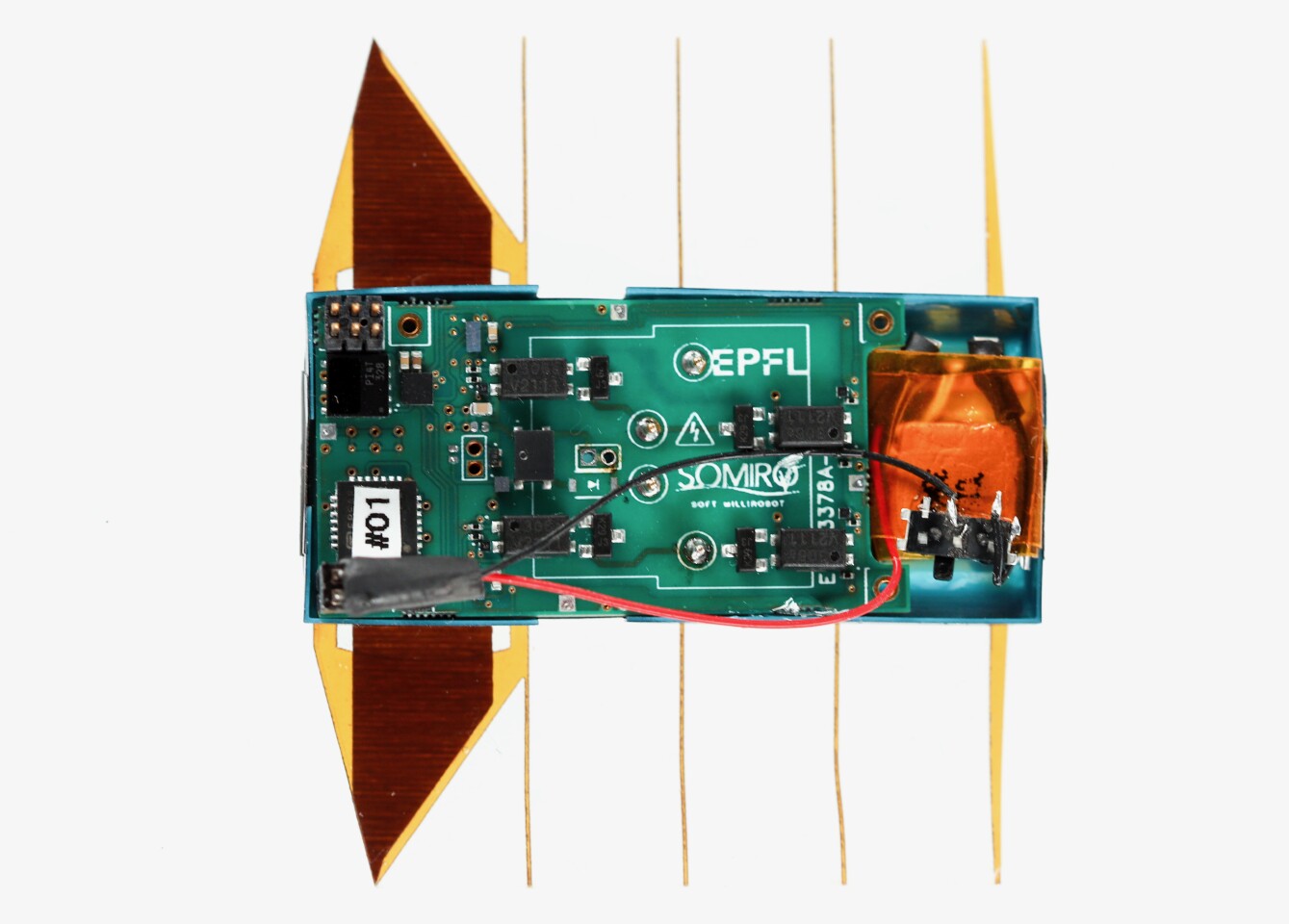
Epfl
O protótipo atual possui sensores de luz que servem como olhos rudimentares, permitindo que ele siga autonomamente fontes de luz em movimento. Também pode empurrar objetos flutuantes pesando mais de 16 vezes o seu próprio peso corporal.
Os usos possíveis para versões mais avançadas do robô podem incluir monitoramento ambiental, rastreamento de poluição e tarefas agrícolas de precisão em ambientes como coberturas de arroz inundadas.
“Nosso objetivo é estender os tempos de operação e melhorar a autonomia”, diz o ex -pesquisador da EPFL Florian Hartmann, que agora é líder do grupo de pesquisa no Instituto Max Planck da Alemanha Planck. “As idéias fundamentais obtidas com este projeto não apenas avançarão na ciência da robótica bioinspirada, mas também estabelecerão a base para sistemas robóticos práticos e práticos que se harmonizam com a natureza”.
Um artigo sobre o estudo foi publicado recentemente na revista Robótica científica. Você pode ver o robô em ação, no vídeo abaixo.
E para outra abordagem de toda a ideia de robô bioinspirado na superfície, confira a Washington State College Robô de água -batedora.
Um robô de natação em miniatura inspirado em minhocas marinhas marinhas
Fonte: Epfl