Para que os robôs operem com segurança em torno de humanos, eles precisam ver que as pessoas estão se aproximando e Eles precisam saber quando fazem contato físico com essas pessoas. Um novo sistema permite que eles façam as duas coisas, usando câmeras localizadas dentro dos braços.
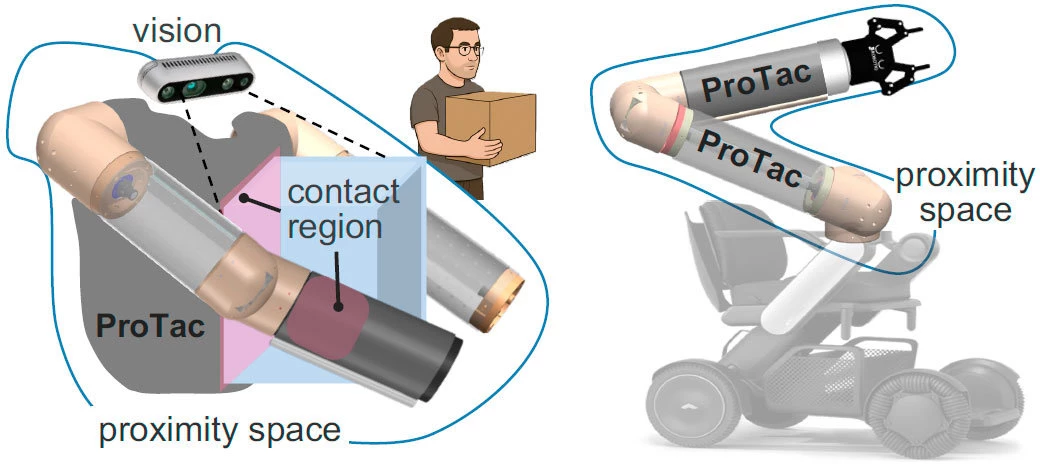
Conhecido como Protac (Próximity e TACdetecção de ladrilhos), a tecnologia está sendo desenvolvida pelo Prof. Van Anh Ho, Dr. Quan Khanh Luu e colegas do Japan Superior Institute of Science and Expertise (JAIST). Ele foi incorporado a um segmento de braço robótico cilíndrico chamado Hyperlink Protac, embora também possa ser usado em outras partes do corpo.
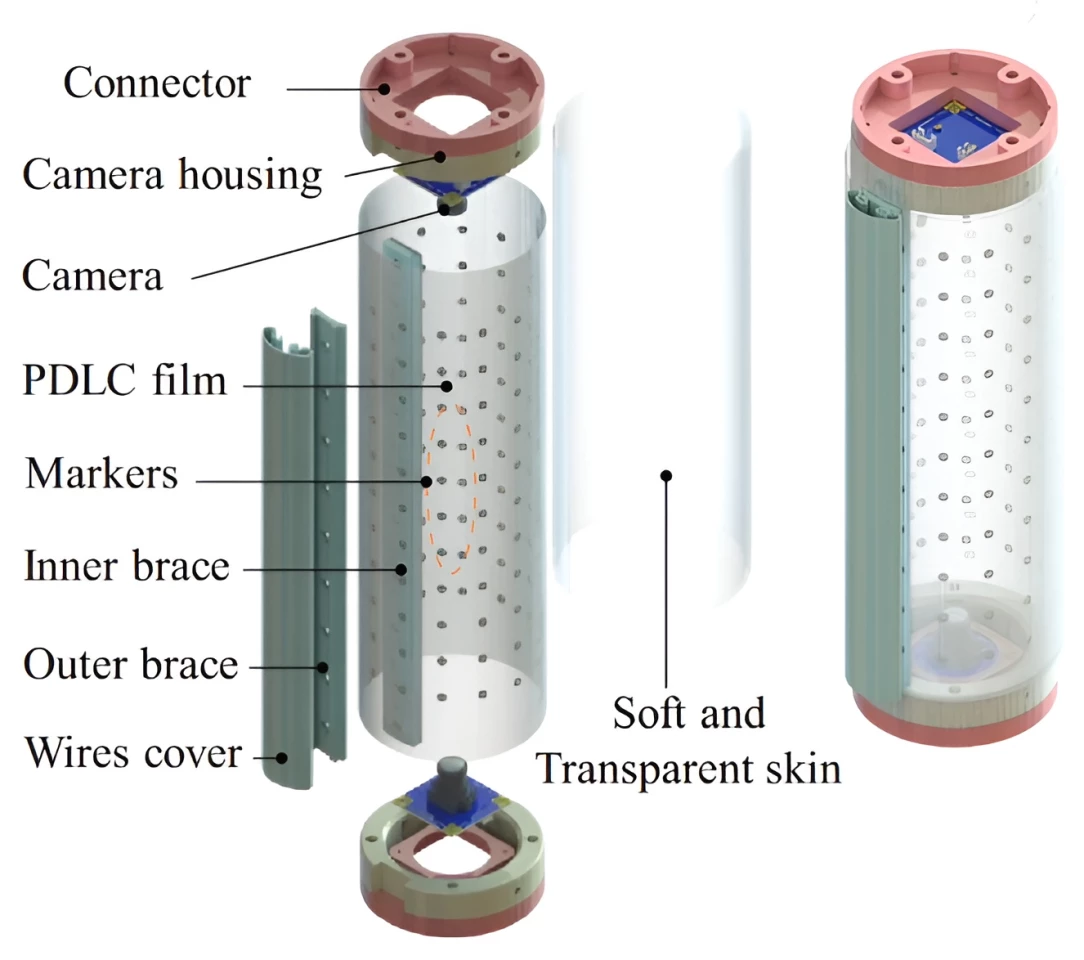
O apêndice oco possui uma pele de polímero macio e transparente, coberta por uma camada flexível de materials de cristal líquido (PDLC) disperso em polímero. Ao aplicar a tensão ao PDLC, ele pode ser alterado rapidamente entre estados transparentes e opacos. Na superfície interna do PDLC, há uma variedade de pontos de marcadores espaçados, que permanecem opacos o tempo todo.
Duas câmeras estereoscópicas estão localizadas dentro do braço – uma em cada extremidade – onde olham para baixo do inside do apêndice.
Van Anh Ho do Jaist
Quando o PDLC é transparente, as câmeras habilitadas para a visão de computador podem ver através dele e perceber o mundo exterior. Se um objeto como uma pessoa for visto se aproximando, um robô usando o hyperlink Protak poderá parar de se mover para não prejudicar essa pessoa ou sair do caminho para evitar contatá -lo.
Quando o PDLC é opaco, as câmeras apenas veem a variedade de pontos suspensos sobre um fundo preto. Se alguém tocar a pele flexível, a pressão faz com que o espaçamento entre os pontos mude naquele native. Portanto, quando as câmeras veem essas deformações ocorrendo, podem determinar onde o braço está sendo tocado e com que quantidade de força.
Como um bônus adicional, o Protac pode ser definido como um “modo de tremer”, no qual o PDLC continuamente (e rapidamente) muda para frente e para trás entre seus estados transparentes e opacos. Isso permite que o sistema também mude entre a proximidade e o sensor tátil, para que ambos possam rastrear pessoas em movimento e Saiba quando eles tocam no braço.
Van Anh Ho do Jaist
“O Protac pode ser aplicado a uma manipulação robótica hábil em vários domínios, onde a segurança e a interação física delicada são críticas”, diz o Dr. Luu.
Um artigo sobre a pesquisa foi publicado recentemente na revista IEEE Transações sobre robótica.
T-RO: proximidade baseada na visão e detecção tátil para armas de robô: design, percepção e controle
Fonte: Jaist