Há algum tempo, estamos ouvindo sobre dispositivos “biestáveis” que podem permanecer em um dos dois estados sem gastar energia. Um novo, inspirado em vagens de sementes de plantas, assume a forma de uma garra robótica que é forte, mas facilmente ativada.
Simplificando, dispositivos biestáveis são devices tensionados que são capazes de alternar entre dois estados estáveis, mas não exigem poder para permanecer em qualquer um de Esses estados.
Clipes de cabelo de metallic são um bom exemplo diário, embora também tenhamos visto a tecnologia utilizada em coisas como Mini raios de manta mecânicosAssim, Tubos estruturais compactáveise Garrinhas robóticas não potentes que agarram objetos após contato.
Quando se trata do último, você não deseja aplicar muita pressão para desencadear a ação de agarrar – isso significa que você deseja que a garra tenha uma baixa “barreira energética”.
O problema é que os dispositivos biestíveis com barreiras de baixa energia normalmente não têm muita força para manter os objetos que eles entendem. Em outras palavras, é provável que eles percam objetos pesados ou itens que são puxados por forças externas.
O que é necessário é uma garra que tem uma barreira de baixa energia ao entender inicialmente um objeto, mas que aumenta sua barreira de energia quando está segurando o merchandise. Quando é hora de liberar o objeto, a barreira de energia é reduzida novamente.
Com esse requisito em mente, uma equipe de cientistas chineses olhou para o Biestável tiro semente vagens da fábrica de impatiens.
Enquanto as sementes nas vagens ainda estiverem imaturas e não estão prontas para a dispersão, as vagens mantêm uma barreira de alta energia, dificultando o acionamento. Uma vez que as sementes amadureceram, no entanto, essa barreira energética diminui. Como resultado, mesmo a pressão de uma gota de chuva é suficiente para fazer com que as vagens atirem nas sementes no solo circundante.
Dr. Jinzhao Yang, da Solar Yat-sen College, Dr. Jianing Wu da Universidade Solar Yat-Sen e Dr. Haijun Peng pela Dalian College of Expertise, China
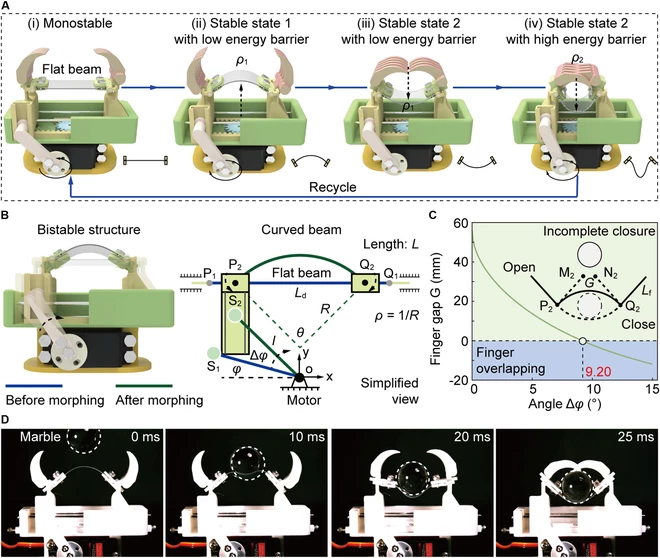
A pinça inspirada em impatiens-pod incorpora dois “dedos” agarrados, cujos inferiores estão conectados a cada extremidade de uma viga elástica. Os dois grampos que conectam os dedos ao feixe são, por sua vez, cada um conectado a um eixo acionado por motor rotativo.
No estado padrão neutro da pinça, a viga é plana e não tensionada. Quando é hora de agarrar um objeto, no entanto, os eixos são girados, fazendo com que o feixe se dobre levemente para cima. Isso o coloca em um estado tensionado e biestável, com uma barreira de baixa energia.
Portanto, quando a pinça é colocada em torno de um objeto-e esse objeto pressiona contra a viga curvada para cima-faz com que o feixe apareça em uma orientação curvada para baixo, desenhando os dedos ao redor do objeto.
Uma vez que isso aconteceu, os eixos são girados na direção oposta, fazendo com que o feixe se incline ainda mais. Isso aumenta sua barreira energética, fortalecendo e protegendo o alcance da garra no merchandise.
Em uma demonstração da tecnologia, uma das garras foi instalada no topo de um drone quadcopter, permitindo que a aeronave pendesse em galhos de árvores, trilhos, and many others. em vez de ter que pairar no lugar. Embora o motor do feixe tenha usado alguns Poder ao ajustar a tensão do feixe, nenhuma energia foi necessária para manter uma espera nos itens. Esse não seria o caso de uma garra convencional.

Teemu Mäki/CC 3.0
“Com sua resposta rápida, forças de interação programáveis e design simples, mas eficiente, nossa garra robótica abre novos caminhos para sistemas robóticos de próxima geração”, diz o Dr. Jianing Wu, da Universidade Solar Yat-Sen, que liderou o projeto junto com o Dr. Haijun Peng da Universidade Dalian da Tecnologia. “Esse mecanismo único pode expandir significativamente a funcionalidade dos robôs para diversas aplicações”.
Um artigo sobre o estudo foi publicado recentemente na revista Pesquisar.
Fonte: Pesquisar by way of Eurekalert