Numa descoberta que não é nada assustadora, os cientistas desenvolveram um método para fixar a pele humana viva aos rostos dos robôs. A tecnologia poderia realmente ter algumas aplicações valiosas, além de fazer Mundo Ocidental-como cenários uma realidade.
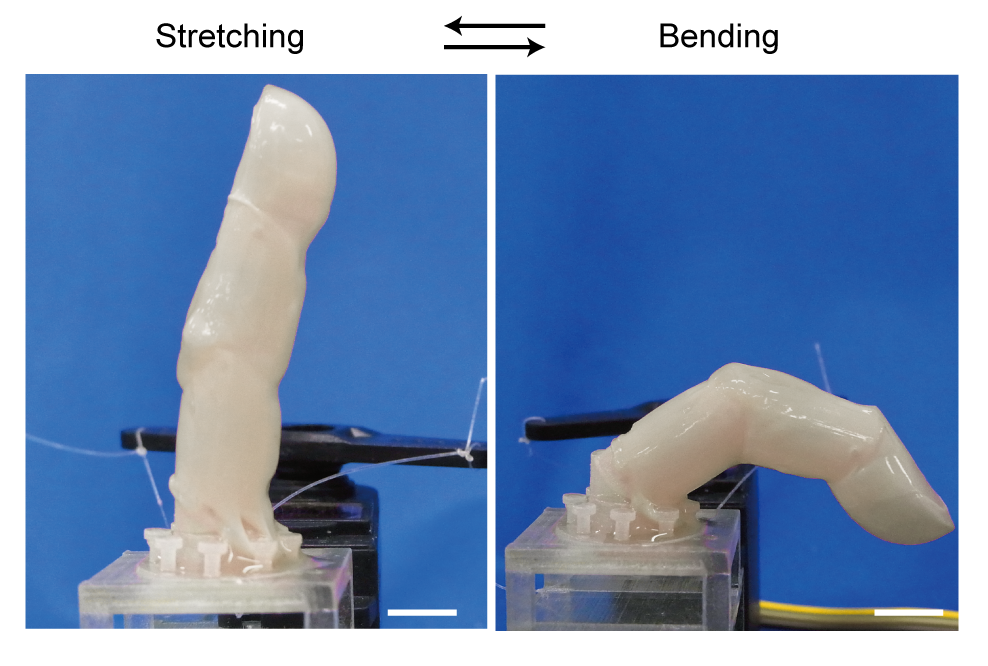
Há dois anos, o Prof. Shoji Takeuchi e colegas da Universidade de Tóquio cobriu um dedo robótico motorizado com uma pele de bioengenharia feito de células humanas vivas.
Esperava-se que este exercício de prova de conceito pudesse abrir caminho não apenas para robôs do tipo andróide mais realistas, mas também para bots com coberturas autocurativas e sensíveis ao toque. A tecnologia também poderá ser utilizada em testes de cosméticos e no treinamento de cirurgiões plásticos.
©2022 Takeuchi et al.
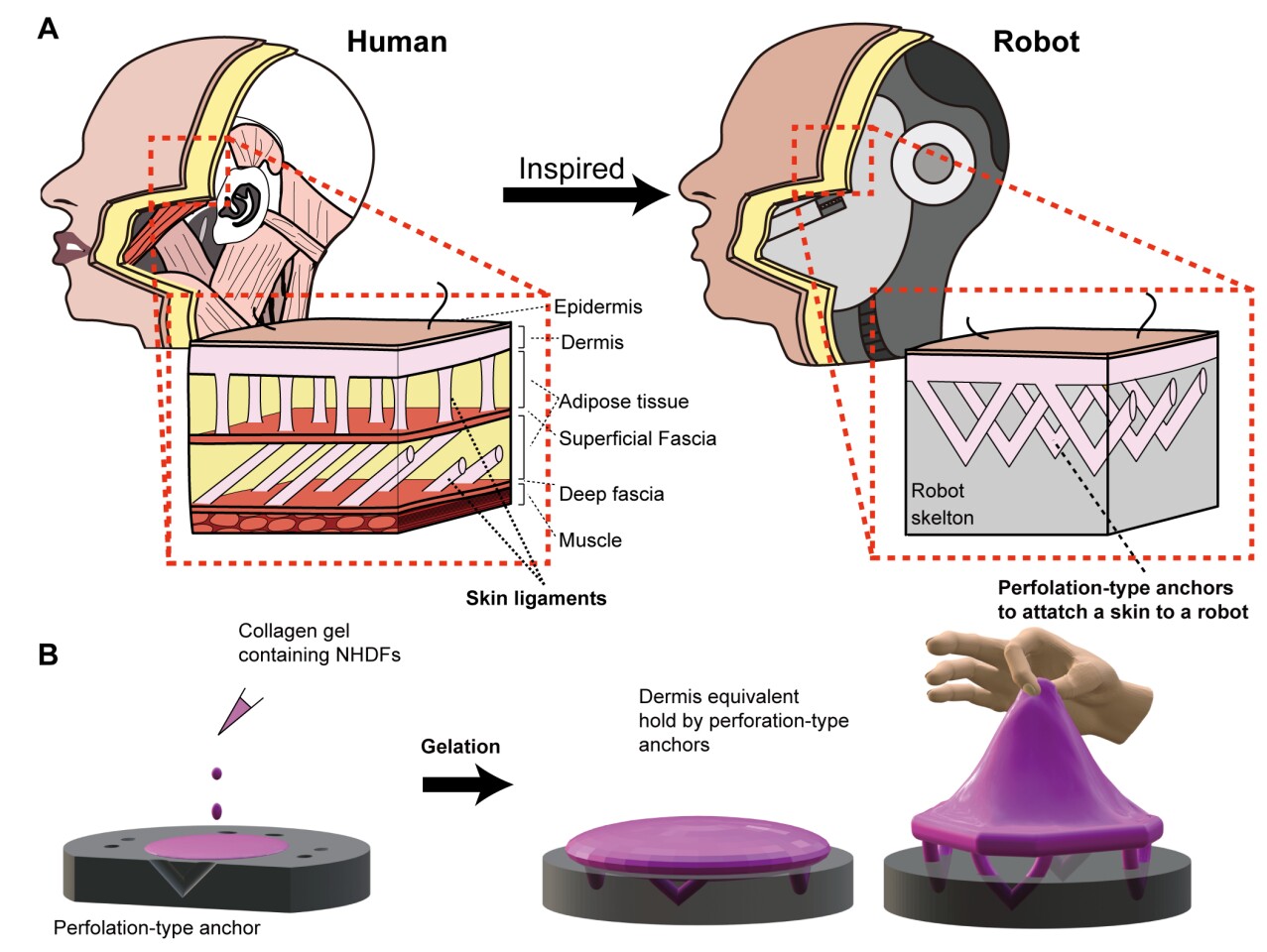
Embora o dedo coberto de pele fosse certamente uma conquista impressionante, a pele não estava conectada de forma alguma ao dedo subjacente – period basicamente uma bainha que encolhia para caber que envolvia o dedo. Por outro lado, a pele facial humana pure está unida ao tecido muscular subjacente por ligamentos compostos de tecido conjuntivo.
Entre outras coisas, esta disposição permite-nos exibir as nossas diversas expressões faciais. Além disso, ao avançar com o tecido subjacente, a pele não impede os movimentos faciais, aglomerando-se. Por esse mesmo motivo, também é menos provável que seja danificado ao ficar preso em objetos externos.
Os cientistas já tentaram conectar a pele produzida pela bioengenharia a superfícies sintéticas, normalmente por meio de pequenas âncoras que se projetam para cima. de essas superfícies. Essas âncoras pontiagudas prejudicam a aparência da pele, evitando que ela pareça lisa. Eles também não funcionam bem em superfícies côncavas, onde todos apontam para o meio.
Com tais limitações em mente, Takeuchi e sua equipe desenvolveram recentemente um novo sistema de ancoragem na pele baseado em pequenas perfurações em forma de V feitas na superfície sintética.
©2024 Takeuchi et al. CC-POR-ND
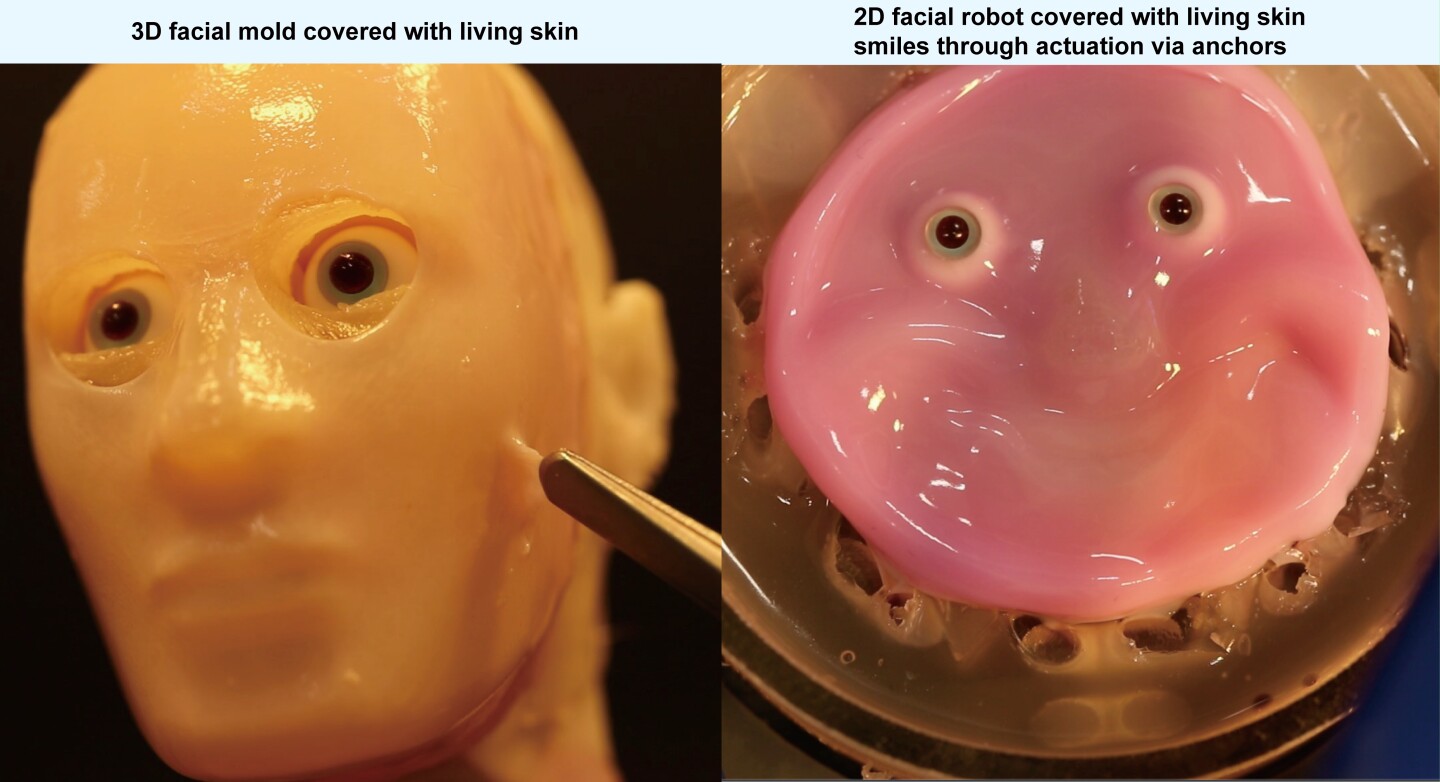
Os cientistas criaram um molde facial humano que incorporava uma série dessas perfurações e depois revestiram esse molde com um gel composto por colágeno e fibroblastos dérmicos humanos. Estas últimas são células responsáveis pela produção de tecido conjuntivo na pele.
Parte do gel desceu para as perfurações, enquanto o restante permaneceu na superfície do molde. Depois de ser deixado em cultura durante sete dias, o gel formou uma cobertura de pele humana que foi firmemente ancorada ao molde através do tecido dentro das perfurações.
Num segundo experimento, foram feitas perfurações em um substrato de borracha de silicone, no qual o gel foi posteriormente aplicado e depois deixado em cultura. O resultado closing foi um rosto simplificado de pele humana que poderia sorrir movendo duas hastes conectadas ao substrato.
©2024 Takeuchi et al. CC-POR-ND
Escusado será dizer que ainda é necessário fazer algum trabalho antes que a tecnologia possa ser utilizada em robôs verdadeiramente realistas.
“Acreditamos que a criação de uma pele mais espessa e realista pode ser alcançada incorporando glândulas sudoríparas, glândulas sebáceas, poros, vasos sanguíneos, gordura e nervos”, diz Takeuchi. “É claro que o movimento também é um fator essential, não apenas o materials, por isso outro desafio importante é criar expressões semelhantes às humanas, integrando atuadores sofisticados, ou músculos, dentro do robô.”
Um artigo sobre a pesquisa foi publicado recentemente na revista Cell Experiences Ciências Físicas.
Fonte: Universidade de Tóquio