
Fonte: DALL·E 2 da OpenAI com aviso “uma imagem hiper-realista de um robô lendo notícias em um laptop computer em uma cafeteria”
Bem-vindo à 6ª edição do Robo-Perception, uma atualização de notícias sobre robótica! Nesta postagem, temos o prazer de compartilhar uma série de novos avanços na área e destacar o progresso dos robôs em áreas como assistência médica, próteses, flexibilidade dos robôs, movimento articular, desempenho no trabalho, design de IA e limpeza doméstica.
Robôs que podem ajudar enfermeiros
No mundo médico, pesquisadores da Alemanha desenvolveram um sistema robótico projetado para ajudar os enfermeiros a aliviar o esforço físico associado ao atendimento ao paciente. Os enfermeiros enfrentam frequentemente grandes exigências físicas quando atendem pacientes acamados, especialmente durante tarefas como reposicioná-los. Seu trabalho explora como a tecnologia robótica pode auxiliar nessas tarefas, ancorando remotamente os pacientes em posição lateral. Os resultados indicam que o sistema melhorou a postura de trabalho dos enfermeiros em média 11,93% e foi classificado como fácil de usar. A investigação destaca o potencial da robótica para apoiar os cuidadores em ambientes de saúde, melhorando as condições de trabalho dos enfermeiros e os cuidados aos pacientes.
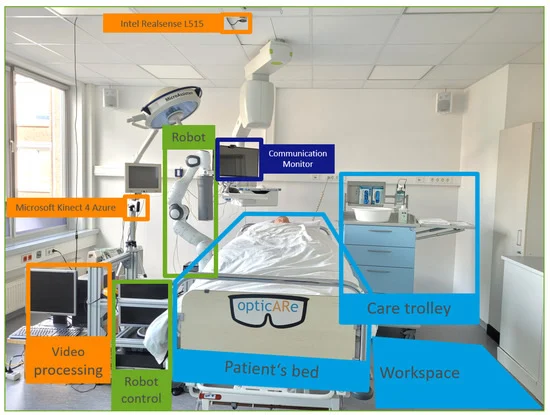
Disposição do quarto do paciente utilizado no estudo. Fonte.
Robôs aprimorando o controle handbook biônico
Mantendo nosso foco relacionado à saúde, recentemente investigadores de numerosas instituições europeias alcançaram um avanço significativo na tecnologia de próteses robóticas, ao implantarem com sucesso uma prótese neuromusculoesquelética, uma mão biônica conectada diretamente aos sistemas nervoso e esquelético do usuário, em uma pessoa com amputação abaixo do cotovelo. Essa conquista envolveu procedimentos cirúrgicos para colocar implantes de titânio nos ossos do rádio e da ulna e transferir nervos cortados para enxertos musculares livres. Essas interfaces neurais proporcionaram uma conexão direta entre a prótese e o corpo do usuário, permitindo melhorar a função protética e aumentar a qualidade de vida. Seu trabalho demonstra o potencial de dispositivos protéticos altamente integrados para melhorar a vida dos amputados por meio de controle neural confiável e uso diário confortável.
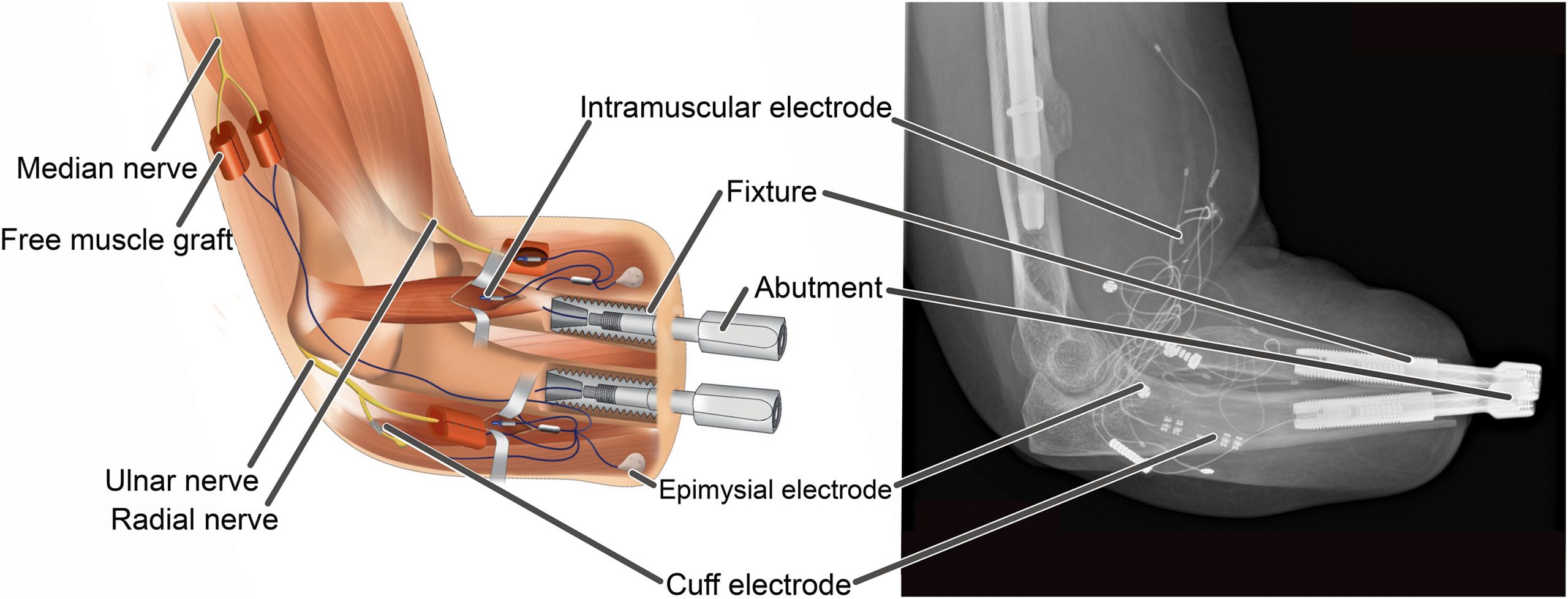
Esquema e raio X de uma interface homem-máquina totalmente integrada em um paciente. Fonte.
Aprendizagem por reforço em robótica suave
Voltando nosso foco para a robótica suave, pesquisadores do Centro de Pesquisa e Estudos Avançados do Instituto Politécnico Nacional do México e da Universidade Autônoma de Coahuila propuseram uma abordagem para usar aprendizagem por reforço (RL) para controle motor de um robô macio acionado pneumático modelado a partir de meio contínuo com densidade variável. Este método envolve um esquema Ator-Crítico de tempo contínuo projetado para rastrear tarefas em um robô suave 3D sujeito a perturbações de Lipschitz. Seu estudo introduz um mecanismo de diferença temporal baseado em recompensa e uma abordagem adaptativa descontínua para pesos neurais no componente Crítico do sistema. O objetivo geral é permitir que o RL controle a natureza complexa, incerta e deformável dos robôs leves, garantindo ao mesmo tempo estabilidade no controle em tempo actual, um requisito essential para sistemas físicos. Esta pesquisa concentra-se na aplicação de RL no gerenciamento dos desafios únicos apresentados por robôs leves.
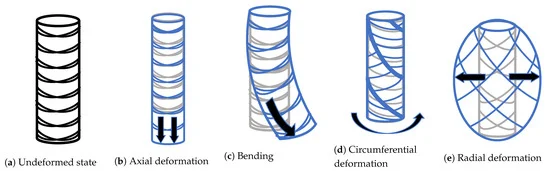
Distorções distintas de um robô flexível de formato cilíndrico. Fonte.
Um robô humanóide do tamanho de um adolescente
Passando para as interações humano-robô, pesquisadores do Laboratório de Robótica Centrada no Ser Humano da Universidade do Texas em Austin lançaram um robô humanóide de tamanho adolescente chamado DRACO 3, projetado em colaboração com a Apptronik. Este robô, adaptado para uso prático em ambientes humanos, possui atuação proximal e emprega mecanismos de contato giratório na parte inferior do corpo, permitindo extensas poses verticais. Um controlador de corpo inteiro (WBC) foi desenvolvido para gerenciar as transmissões complexas do DRACO 3. Esta pesquisa oferece insights sobre o desenvolvimento e controle de humanóides com juntas de contato rolantes, com foco na praticidade e no desempenho.
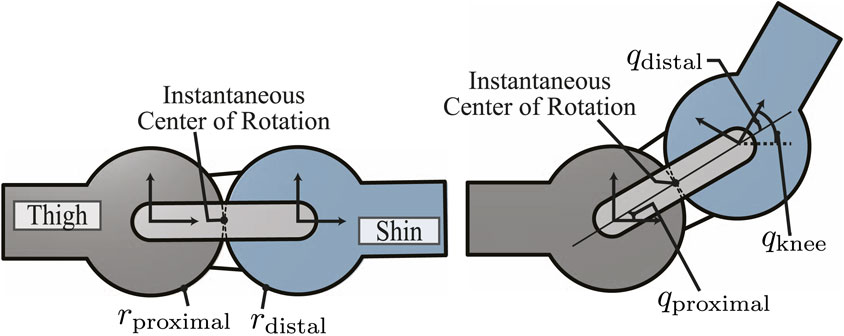
Diagrama ilustrando a junta de contato rolante no joelho. Configuração inicial (esquerda) e deslocamento pós-angular (direita). Fonte.
Impactos dos robôs no desempenho
Mudando nosso foco para a psicologia, recentemente pesquisadores da Technische Universität Berlin investigaram o fenômeno da vadiagem social em equipes humanos-robôs. A preguiça social refere-se à redução do esforço particular person em um ambiente de equipe em comparação com o trabalho sozinho. O estudo envolveu participantes inspecionando placas de circuito em busca de defeitos, com um grupo trabalhando sozinho e o outro com um parceiro robô. Apesar de um robô confiável que marcava defeitos nas placas, os participantes que trabalhavam com o robô identificaram menos defeitos em comparação com aqueles que trabalhavam sozinhos, sugerindo uma ocorrência potencial de vadiagem social em equipes humanos-robôs. Esta pesquisa lança luz sobre os desafios associados à colaboração humano-robô e seu impacto no esforço e desempenho particular person.
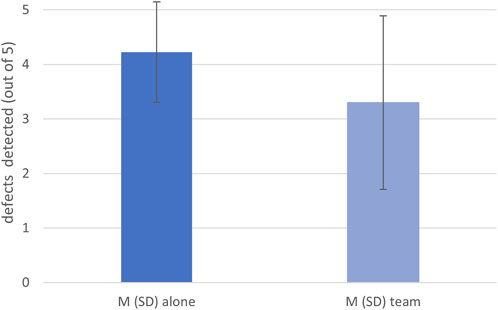
Resultados do trabalho solo vs. trabalho com robô. Fonte.
Um robô projetado por IA
Mudando nosso foco para o design de robôs, pesquisadores da Northwestern College desenvolveram um sistema de IA que projeta robôs do zero, permitindo criar um robô ambulante em segundos, uma tarefa que a natureza levou bilhões de anos para evoluir. Este sistema de IA é executado em um computador pessoal leve, sem depender de supercomputadores que consomem muita energia ou de grandes conjuntos de dados, oferecendo o potencial para projetar rapidamente robôs com formas únicas. O sistema funciona iterando um projeto, avaliando suas falhas e refinando a estrutura em questão de segundos. Ele abre caminho para uma nova period de ferramentas projetadas por IA, capazes de atuar diretamente no mundo para diversas aplicações.
Robô de projeto de impressora 3D. Fonte.
Um robô personalizável para organização doméstica
Finalmente, no campo da robótica doméstica, pesquisadores de Stanford, Princeton, Universidade de Columbia e Googledesenvolveram o TidyBot, um robô de um braço projetado para limpar espaços de acordo com as preferências pessoais. O TidyBot usa um grande modelo de linguagem treinado em dados da Web para identificar vários objetos e entender onde colocá-los, tornando-o altamente personalizável de acordo com diferentes preferências. Em testes reais, o robô consegue guardar corretamente aproximadamente 85% dos objetos, melhorando significativamente a organização doméstica. Embora o TidyBot ainda tenha espaço para melhorias, os pesquisadores acreditam que ele é uma grande promessa para tornar os robôs mais versáteis e úteis em residências e outros ambientes.

Tidybot em treinamento. Fonte.
O desenvolvimento contínuo numa multiplicidade de sectores destaca a flexibilidade e o carácter constantemente avançado da tecnologia robótica, revelando novas possibilidades para a sua incorporação numa vasta gama de indústrias. A expansão progressiva no domínio da robótica reflecte um compromisso inabalável e oferece um vislumbre das potenciais consequências destes avanços para os tempos vindouros.
Fontes:
- Hinrichs, P., Seibert, Okay., Arizpe Gómez, P., Pfingsthorn, M., & Hein, A. (2023). Um sistema robótico para ancorar um paciente em posição lateral e reduzir o esforço físico dos enfermeiros. Robótica, 12(5)
- Ortiz-Catalán, M., Zbinden, J., Millenaar, J., D’Accolti, D., Controzzi, M., Clemente, F., Cappello, L., Earley, EJ, Enzo Mastinu, Justyna Kolankowska, Munoz -Novoa, M., Stewe Jönsson, Njel, C., Paolo Sassu e Rickard Brånemark. (2023). Uma mão biônica altamente integrada com controle neural e suggestions para uso na vida diária. Robótica Científica
- Pantoja-Garcia, L., Parra-Vega, V., Garcia-Rodriguez, R., & Vázquez-García, CE (2023). Um novo ator – aprendizagem por reforço motor crítico para robôs macios contínuos. Robótica, 12(5)
- Bang, SH, Gonzalez, C., Ahn, J., Paine, N., & Sentis, L. (2023, 26 de setembro). Controle e avaliação de um robô humanóide com juntas de contato rolantes na parte inferior do corpo. Fronteiras.
- Cymek, DH, Truckenbrodt, A., & Onnasch, L. (2023, 31 de agosto). Recoste-se ou incline-se? explorando a vadiagem social em equipes humanos-robôs. Fronteiras.
- Evolução instantânea: IA projeta novo robô do zero em segundos. (nd). Notícias.northwestern.edu.
- Universidade, S. (2023, 3 de outubro). Robotic fornece limpeza personalizada do quarto. Notícias de Stanford.

Shaunak Kapur
faz parte da equipe de voluntariado do Robohub e está prestes a terminar o ensino médio (Texas). Shaun foi cativado pela robótica desde muito jovem.
Shaunak Kapur faz parte da equipe de voluntariado do Robohub e está prestes a terminar o ensino médio (Texas). Shaun foi cativado pela robótica desde muito jovem.