
A Invent Automation integrou a tecnologia de visão CapSen à medida que a DENSO automatiza. Fonte: Automação de Invenção
A fabricação automotiva há muito se beneficia da implantação criteriosa da robótica e da automação, e por boas razões. Entre os muitos processos de produção complexos, alguns podem ser demasiado difíceis ou demasiado tediosos para serem concluídos de forma segura e eficiente por trabalhadores humanos. Como resultado, as tecnologias de automação industrial podem agregar um enorme valor aos fabricantes de equipamentos originais e aos fornecedores de peças automotivas de várias maneiras. Por exemplo, a DENSO, fabricante líder world de peças automotivas, procurou recentemente automatizar uma tarefa fisicamente desafiadora e repetitiva de manuseio de sacolas.
Em vez de permitir que os funcionários continuem a carregar e descarregar grandes pilhas de sacolas pesadas de e para uma cabine de pintura (Figura 1), o empresa parceria com CapSen Robóticaque personalizou seu software program de visão 3D, planejamento de movimento e controle para se adequar à tarefa.
A DENSO também fez parceria com integrador de sistemas Inventar Automação desenvolver um sistema que simplificasse o processo e permitisse que os funcionários contribuíssem no chão de fábrica de maneiras mais valiosas e menos exigentes fisicamente. A atividade contribuiu para os esforços mais amplos da DENSO para complementar o trabalho humano com automação para melhorar o desempenho dos membros da equipe e da empresa.

Figura 1: Sacolas grandes e pesadas cheias de peças automotivas são transportadas de e para uma cabine de pintura em um transportador, onde um cobot seleciona e coloca as sacolas como parte de um processo automatizado. Fonte: Automação de Invenção
Demorou (menos de) 60 segundos na DENSO
Como parte das operações da DENSO, automotivo as peças são pintadas com uma tinta de baixo brilho cor de carvão que suaviza visualmente a superfície para uma aparência mais limpa, ao mesmo tempo que ajuda a absorver a luz e reduzir o brilho no inside do veículo.
Na configuração anterior, os funcionários empilhavam seis contêineres cheios de peças plásticas automotivas em uma esteira que period então apresentada a um operador que removia manualmente as peças e as colocava em uma estação de cabine de pintura (Figura 2) e depois as embalava de volta nos contêineres. . Um funcionário empilhava ou desempilhava uma sacola a cada 30 segundos, dia após dia.
Esse movimento repetitivo foi identificado como uma oportunidade de automação, que liberaria os membros da equipe para realizar trabalhos mais impactantes. No entanto, as restrições de format no chão de fábrica dificultaram as formas tradicionais de automação, levando à criação de um sistema compacto e flexível.
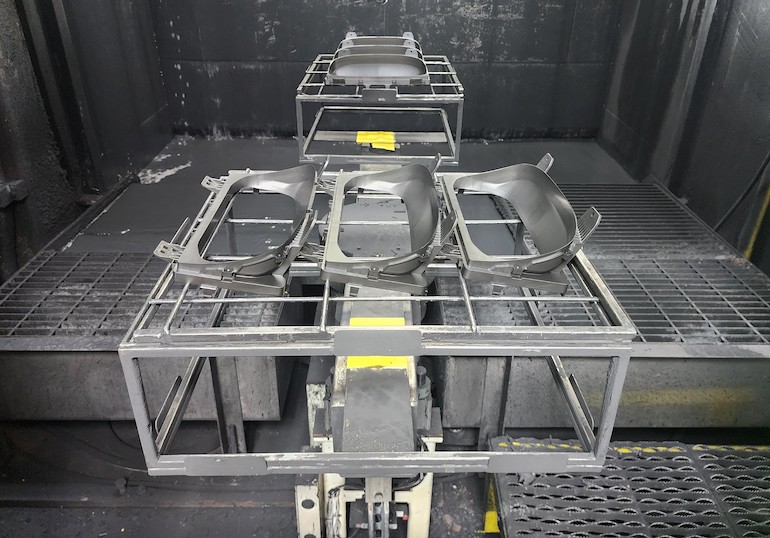
Figura 2: As peças automotivas são levadas para uma cabine de pintura, onde serão pulverizadas com uma tinta de baixo brilho que suaviza a superfície e ajuda a absorver a luz no inside do veículo. Fonte: Automação de Invenção
Com o novo sistema, um transportador de entrada transporta caixas de objetos não pintados para um robô colaborativo de seis eixos (Figura 3) com uma câmera de profundidade Intel RealSense 3D RGB acoplada ao seu atuador ultimate. A câmera ajuda o robô a identificar visualmente a sacola e a medir sua altura para a coleta.
O CapSen Pic 2.0 O software program, executado em um PC industrial com unidade de processamento gráfico (GPU), permite ao robô planejar seu movimentolocalize, selecione e manipule a sacola e mova-a em direção a outro transportador em direção à estação da cabine de pintura. Lá, as peças são descarregadas, pintadas, levadas ao forno para cura e inspecionadas antes de serem colocadas de volta nos contenedores e na esteira de volta ao robô, que identifica o contenedor e o coloca em uma esteira de saída.

Figura 3: Robô colaborativo COBOTTA PRO 1300 da DENSO, apenas para referência. Fonte: Automação de Invenção
Parceiros abordam manobrabilidade e desafios de visão
Movimentos precisos ao longo de vários eixos são necessários para que o robô escolha e coloque grandes recipientes sem causar colisões. O CapSen PiC 2.0 simulação O ambiente permitiu à equipe testar a manobrabilidade do robô e garantir que tudo estava acessível e que o robô não colidiria com nada.
Mas quando a equipe testou o sistema no mundo actual, descobriu que as sacolas começavam a dobrar quando eram apanhadas pelo robô. Para compensar o peso da sacola e garantir um movimento fluido sem colisão dentro da célula compacta, os parceiros trabalharam para personalizar o sistema.
“Usamos IA em nosso software program para permitir que os robôs executem uma variedade de tarefas de coleta e colocação, incluindo coleta aleatória de lixo, atendimento de máquinasembalagem, montagem e manuseio de sacolas”, disse Jared Glover, CEO da CapSen Robotics. “Para aplicações desafiadoras, especialmente aquelas onde o ambiente de simulação por si só não é suficiente, personalizamos nossos algoritmos e modelos de IA com base nos dados da tarefa de produção. Isso permite que o software program otimize o movimento do robô para permitir que ele se mova livremente sem colisões e transfira a sacola dentro do tempo de ciclo.”
Para o projeto de manuseio de sacolas da DENSO, a CapSen Robotics primeiro treinou seu software program de IA para detectar e localizar a alça da sacola. A câmera RGB-D captura imagens da alça e o software program executa algoritmos de aprendizado de máquina que detectam a alça, permitindo que o software program faça o planejamento do movimento do robô.
Depois que o atuador ultimate do robô for colocado na alça, o peso da sacola deve ser identificado para que o robô não pare de trabalhar ou faça movimentos bruscos que façam a sacola cair. Em vez de usar uma balança, o software program CapSen analisa os valores de torque do motor e usa esses valores para determinar o peso a ser selecionado.
“Usar a detecção de torque do robô para obter o peso e, claro, confirmar se a sacola foi recolhida foi um valioso poka-yoke que a CapSen adicionou ao sistema”, disse Kevin Peek, engenheiro de produção da DENSO.
Além disso, algumas máquinas visão surgiram desafios durante o projeto e instalação do sistema, mas a equipe colaborativa trabalhou em conjunto para evitar que eles se tornassem um problema.
“As pilhas de sacolas também podem conter até seis sacolas, portanto, o sistema precisava garantir o empilhamento adequado”, de acordo com Peek. “Se houver apenas duas caixas, talvez o problema seja menor, mas se houver seis caixas empilhadas e uma não estiver aninhada corretamente, toda a pilha poderá cair e causar um grande atraso no processo.”
Para resolver esse desafio, o sistema foi projetado de forma que, assim que um robô coloca uma sacola em uma pilha, o robô se mova ligeiramente para trás para visualizar a pilha com a câmera. Os algoritmos de aprendizado de máquina no software program ajudaram o sistema a procurar uma lacuna entre duas caixas e garantir o empilhamento adequado, enquanto o software program também contou e verificou o número correto de caixas na pilha.

Registre-se hoje para economizar 40% em passes para conferências!
DENSO relata zero quedas, zero escolhas perdidas
Em última análise, a versatilidade do software program CapSen PiC 2.0 levou à sua escolha como solução de software program para este projeto, pois permite aos utilizadores finais utilizar plenamente todos os dados provenientes das diferentes peças de {hardware} do sistema. Isso ocorre em vez de trabalhar por meio de programação nativa, como quando se usa um controlador lógico programável (PLC). Nesta aplicação não há PLC no gabinete.
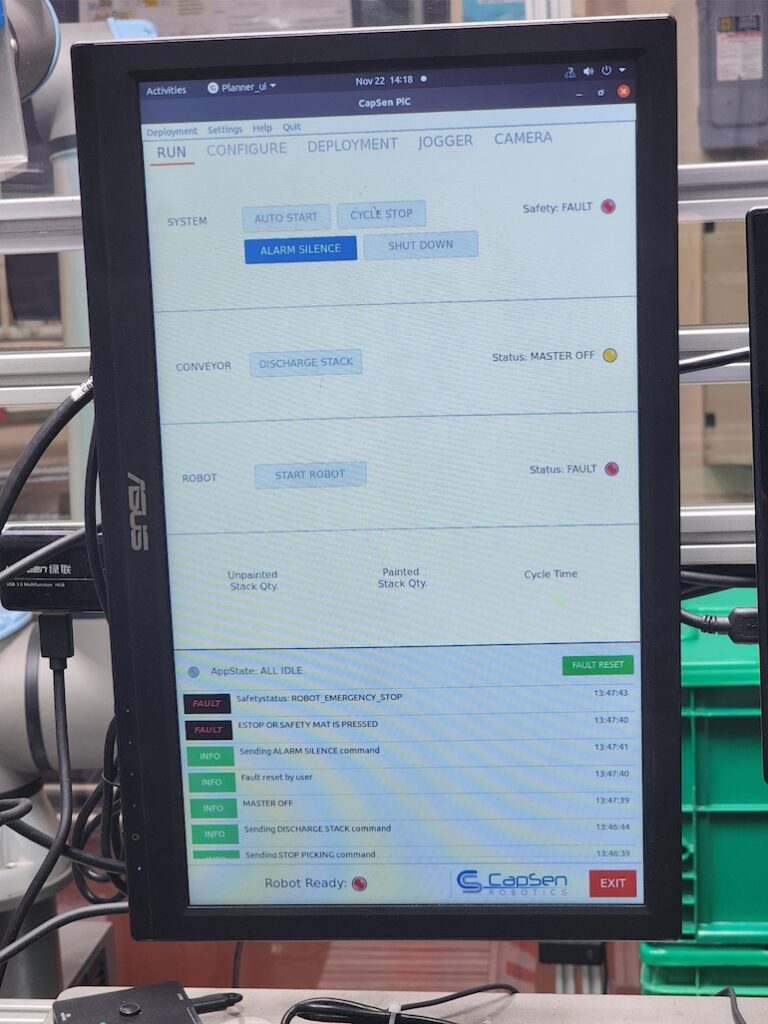
Figura 4: A IHM intuitiva do CapSen PiC mostra o standing do sistema e simplifica o processo de execução da operação. Fonte: Automação de Invenção
Tudo é tratado na interface homem-máquina (HMI) CapSen. Os operadores podem usá-lo para controlar máquinas, obter informações de calibração do robô e visualizar o que a câmera vê, entre outros recursos (Figura 4).
A interface do usuário foi projetada para que funcionários não técnicos tenham autonomia para operar o sistema como parte de suas rotinas diárias, sem a necessidade de automação ou conhecimentos de engenharia.
O software program também é independente de {hardware}, o que proporcionou um benefício específico à DENSO. Na verdade, os testes iniciais do sistema envolveram manipulação móvelonde um robô móvel autônomo (RAM) transportou o robô pelas instalações com o objetivo de movimentar sacolas e outros contêineres por todo o armazém.
Nesta configuração, o software program CapSen controla o AMR, obtém coordenadas dele e envia instruções de correção ao AMR para alinhar o AMR às pistas do rack de fluxo.
Embora empilhar e desempilhar recipientes seja uma aplicação comum em ambientes industriais, este sistema foi projetado com a flexibilidade em mente, para que possa ser expandido ou adaptado para outras aplicações ou twister móvel com um AMR.
Além disso, desde que o sistema foi instalado, o robô não deixou cair nenhuma sacola nem errou nenhuma escolha, removendo um peso físico e metafórico dos ombros dos funcionários da DENSO.
Sobre o autor
Bo Ridley é vice-presidente executivo da Knoxville, Tennessee Inventar Automação. Anteriormente, trabalhou como engenheiro de produção e projetista de máquinas na DENSO. Este estudo de caso foi publicado com permissão.