Embora os caracóis sejam lentos e tenham o fundo viscoso, eles inspiraram um novo tipo de robô que pode ser bastante útil. Grupos desses bots podem operar de forma independente ou unir-se para realizar tarefas que de outra forma seriam impossíveis.
Nos últimos anos ouvimos muito sobre “robótica de enxame.”
Este conceito envolve a utilização de pequenos robôs que podem trabalhar sozinhos ou como parte de um grupo de bots idênticos. Neste último cenário, todos os robôs comunicam entre si, coordenando os seus movimentos para realizar o trabalho.
Esse trabalho pode envolver a busca de sobreviventes em locais de desastres, a realização de reconhecimento em ambientes perigosos ou até mesmo a exploração de superfícies de outros planetas.
Para algumas aplicações, os robôs precisam estar fisicamente interligados.
Como os bots aéreos e subaquáticos podem se mover horizontal e verticalmente, eles são capazes de formar formas tridimensionais quando unidos. Por outro lado, como os robôs terrestres (no solo) só podem mover-se horizontalmente, estão limitados a formar formas bidimensionais – limitando assim as suas utilizações potenciais. Além do mais, a maioria dos modelos experimentais criados até agora só podem se mover através superfícies lisas e planas.
As coisas seriam diferentes, contudo, se existissem robôs terrestres “off-road” que pudessem subir uns sobre os outros, empilhando-se em configurações tridimensionais. É aí que entra o novo robô caracol.
A Universidade Chinesa de Hong Kong
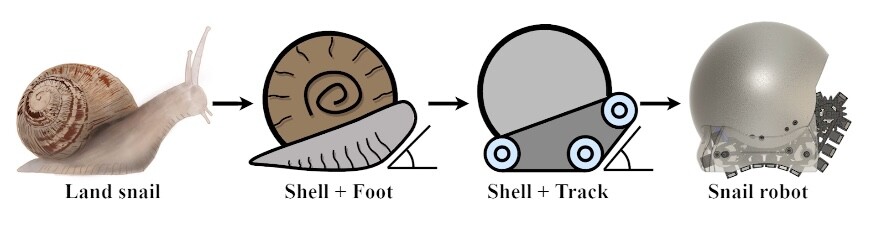
Desenvolvido por Da Zhao e colegas da Universidade Chinesa de Hong Kong, o dispositivo foi inspirado no caracol terrestre White Jade. Como aquele gastrópode, ele pode se mover enquanto faz uma bonito bom trabalho em aderir às superfícies, mas pare e use a sucção para formar uma ligação muito mais forte quando necessário.
O robô possui uma carcaça esférica de ferro ferromagnético, dentro da qual estão uma bateria, um microprocessador e outros componentes eletrônicos. Na parte inferior dessa concha há um conjunto de trilhos semelhantes a tanques feitos de borracha com ímãs embutidos. Uma ventosa retrátil a vácuo está localizada entre os dois trilhos.

A Universidade Chinesa de Hong Kong
Quando o robô está se movendo no “modo livre”, a ventosa é mantida retraída e sem energia. O bot simplesmente se transfer por terrenos lisos e irregulares em suas trilhas, utilizando os ímãs dessas trilhas para subir nas conchas de outros robôs caracóis.
Uma vez colocado lá em cima, o bot muda para o “modo forte”, abaixando e ligando sua ventosa. Esse copo então se agarra firmemente à carcaça do outro robô, mantendo os dois bots firmemente juntos. Dito isto, a carcaça do robô ainda pode girar em relação ao copo, permitindo que ele gire no native sem perder a sucção.

A Universidade Chinesa de Hong Kong
Nos testes ao ar livre realizados até agora, enxames de robôs caracóis trabalharam juntos para realizar tarefas como subir em saliências, atravessar lacunas e formar um único braço robótico. Embora os bots tenham sido controlados remotamente para estas experiências, espera-se que os seus descendentes possam um dia fazer tais coisas de forma autónoma.
Você pode ver os robôs caracóis em ação no vídeo abaixo. Um artigo sobre a pesquisa foi publicado recentemente na revista Comunicações da Natureza.
E se você ficar desapontado porque os bots não parecem tanto como caracóis reais, confira o caracol-robô autocurável que foi criado no ano passado na Carnegie Mellon College.
(Nature Communications) Enxames robóticos inspirados em caracóis
Fonte: Comunicações da Natureza