 Os pesquisadores demonstraram que o robô videira pode levantar com segurança e estabilidade uma variedade de objetos pesados e frágeis, como uma melancia. Crédito da imagem: Cortesia dos pesquisadores
Os pesquisadores demonstraram que o robô videira pode levantar com segurança e estabilidade uma variedade de objetos pesados e frágeis, como uma melancia. Crédito da imagem: Cortesia dos pesquisadores
Por Jennifer Chu
No mundo da horticultura, algumas vinhas são especialmente atraentes. À medida que crescem, as gavinhas lenhosas podem contornar obstáculos com força suficiente para derrubar cercas e árvores inteiras.
Inspirados pela tenacidade sinuosa das videiras, engenheiros do MIT e da Universidade de Stanford desenvolveram uma pinça robótica que pode serpentear e levantar uma variedade de objetos, incluindo um vaso de vidro e uma melancia, oferecendo uma abordagem mais suave em comparação com designs de pinças convencionais. Uma versão maior das gavinhas robóticas também pode levantar um ser humano da cama com segurança.
O novo bot consiste em uma caixa pressurizada, posicionada próxima ao objeto alvo, de onde longos tubos em forma de videira inflam e crescem, como meias viradas do avesso. À medida que se estendem, as vinhas giram e enrolam-se em torno do objeto antes de continuarem de volta para a caixa, onde são automaticamente fixadas no lugar e mecanicamente enroladas de volta para levantar suavemente o objeto com um aperto suave, semelhante a uma funda.
Os pesquisadores demonstraram que o robô videira pode levantar com segurança e estabilidade uma variedade de objetos pesados e frágeis. O robô também pode se espremer em espaços apertados e empurrar a desordem para alcançar e agarrar um objeto desejado.
A equipe prevê que esse tipo de garra robótica possa ser usada em uma ampla variedade de cenários, desde a colheita agrícola até o carregamento e descarregamento de cargas pesadas. No curto prazo, o grupo está explorando aplicações em ambientes de cuidados a idosos, onde vinhas robóticas infláveis e macias poderiam ajudar a levantar suavemente uma pessoa da cama.
“Tirar uma pessoa da cama é uma das tarefas fisicamente mais extenuantes que um cuidador realiza”, diz Kentaro Barhydt, candidato a doutorado no Departamento de Engenharia Mecânica do MIT. “Esse tipo de robô pode ajudar a aliviar o cuidador e pode ser mais suave e confortável para o paciente.”
Barhydt, juntamente com seu co-autor de Stanford, O. Godson Osele, e seus colegas, apresentar o novo design robótico na revista Science Advances. Os coautores do estudo são Harry Asada, professor Ford de engenharia no MIT, e Allison Okamura, professor de engenharia Richard W. Weiland na Universidade de Stanford, junto com Sreela Kodali e Cosmia du Pasquier na Universidade de Stanford, e o ex-aluno de pós-graduação do MIT Chase Hartquist, agora na Universidade da Flórida, Gainesville.
Aberto e fechado
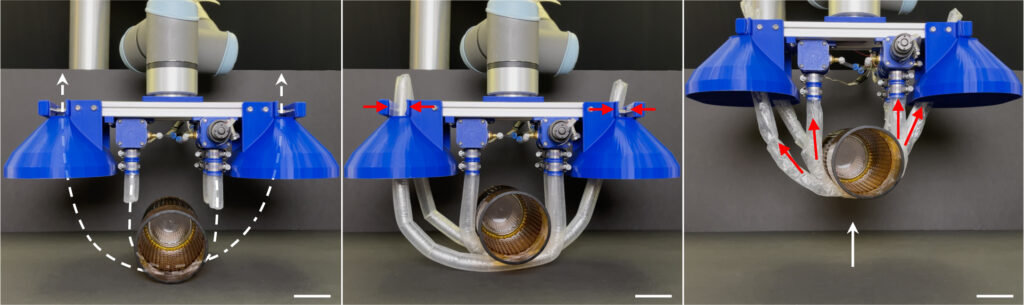 À medida que se estendem, as vinhas giram e enrolam-se em torno do objeto antes de continuarem de volta para a caixa, onde são automaticamente fixadas no lugar e mecanicamente enroladas de volta para levantar suavemente o objeto com um aperto suave, semelhante a uma funda. Crédito da imagem: Cortesia dos pesquisadores.
À medida que se estendem, as vinhas giram e enrolam-se em torno do objeto antes de continuarem de volta para a caixa, onde são automaticamente fixadas no lugar e mecanicamente enroladas de volta para levantar suavemente o objeto com um aperto suave, semelhante a uma funda. Crédito da imagem: Cortesia dos pesquisadores.
Os colaboradores da equipe de Stanford, liderados por Okamura, foram pioneiros no desenvolvimento de robôs macios inspirados em videiras que crescem para fora de suas pontas. Esses projetos são em grande parte construídos a partir de tubos pneumáticos finos, porém resistentes, que crescem e inflam com pressão de ar controlada. À medida que crescem, os tubos podem torcer, dobrar e serpentear pelo ambiente e se espremer em espaços apertados e desordenados.
Os pesquisadores exploraram principalmente robôs de videira para uso em inspeções de segurança e operações de busca e salvamento. Mas no MIT, Barhydt e Asada, cujo grupo desenvolveu auxiliares robóticos para idosos, questionaram-se se tais robôs inspirados na videira poderiam enfrentar certos desafios no cuidado dos idosos – especificamente, o desafio de levantar uma pessoa da cama com segurança. Muitas vezes, em ambientes de enfermagem e reabilitação, este processo de transferência é feito com um elevador de paciente, operado por um cuidador que deve primeiro mover fisicamente o paciente para o seu lado e depois de volta para um lençol semelhante a uma rede. O cuidador amarra o lençol ao redor do paciente e o prende ao elevador mecânico, que então pode içar suavemente o paciente para fora da cama, semelhante a suspender uma rede ou tipoia.
A equipe do MIT e de Stanford imaginou que, como alternativa, um robô semelhante a uma videira poderia serpentear suavemente por baixo e ao redor de um paciente para criar seu próprio tipo de tipoia, sem que um cuidador tivesse que manobrar fisicamente o paciente. Mas, para levantar a funda, os investigadores perceberam que teriam de adicionar um elemento que faltava nos designs de robôs de videira existentes: essencialmente, teriam de fechar o ciclo.
A maioria dos robôs inspirados na videira são projetados como sistemas de “circuito aberto”, o que significa que atuam como cordas abertas que podem se estender e dobrar em diferentes configurações, mas não são projetados para se prenderem a nada para formar um circuito fechado. Se fosse possível fazer com que um robô videira se transformasse de um circuito aberto em um circuito fechado, Barhydt supôs que ele poderia se transformar em uma tipoia em torno do objeto e se puxar para cima, junto com o que ou quem quer que ele pudesse segurar.
Para seu novo estudo, Barhydt, Osele e seus colegas descrevem o projeto de uma nova garra robótica inspirada na videira que combina ações de circuito aberto e fechado. Em uma configuração de circuito aberto, uma videira robótica pode crescer e girar em torno de um objeto para criar uma pegada firme. Ele pode até mesmo se enterrar sob um humano deitado na cama. Uma vez feita a captura, a videira pode continuar a crescer e se fixar em sua fonte, criando um laço fechado que pode então ser retraído para recuperar o objeto.
“As pessoas podem presumir que, para pegar algo, basta estender a mão e agarrá-lo”, diz Barhydt. “Mas existem diferentes estágios, como posicionamento e retenção. Ao transformar entre circuitos abertos e fechados, podemos alcançar novos níveis de desempenho, aproveitando as vantagens de ambas as formas para seus respectivos estágios.”
Suspensão suave
Como demonstração de seu novo conceito de circuito aberto e fechado, a equipe construiu um sistema robótico em grande escala projetado para levantar uma pessoa da cama com segurança. O sistema compreende um conjunto de caixas pressurizadas fixadas em cada extremidade de uma barra superior. Uma bomba de ar dentro das caixas infla lentamente e desenrola finos tubos em forma de videira que se estendem em direção à cabeceira e aos pés da cama. A pressão do ar pode ser controlada para trabalhar suavemente os tubos sob e ao redor de uma pessoa, antes de voltarem às suas respectivas caixas. As vinhas então passam por um mecanismo de fixação que as prende a cada caixa. Um guincho enrola as vinhas de volta em direção às caixas, levantando suavemente a pessoa no processo.
“Objetos pesados, mas frágeis, como o corpo humano, são difíceis de agarrar com as mãos robóticas disponíveis hoje”, diz Asada. “Desenvolvemos uma garra robótica em crescimento, semelhante a uma videira, que pode envolver um objeto e suspendê-lo com cuidado e segurança.”
“Há todo um espaço de design que esperamos que este trabalho encourage nossos colegas a continuar a explorar”, diz o co-autor Osele. “Estou especialmente ansioso pelas implicações para os pedidos de transferência de pacientes nos cuidados de saúde.”
“Estou muito entusiasmado com o trabalho futuro para usar robôs como esses para ajudar fisicamente pessoas com desafios de mobilidade”, acrescenta o coautor Okamura. “Os robôs flexíveis podem ser relativamente seguros, de baixo custo e projetados de maneira superb para necessidades humanas específicas, em contraste com outras abordagens, como os robôs humanóides.”
Embora o design da equipe tenha sido motivado por desafios no cuidado aos idosos, os pesquisadores perceberam que o novo design também poderia ser adaptado para realizar outras tarefas de preensão. Além de seu sistema em grande escala, eles construíram uma versão menor que pode ser acoplada a um braço robótico comercial. Com esta versão, a equipe mostrou que o robô videira pode agarrar e levantar uma variedade de objetos pesados e frágeis, incluindo uma melancia, um vaso de vidro, um sino, uma pilha de hastes de steel e uma bola de playground. As vinhas também podem serpentear por uma lixeira bagunçada para retirar um objeto desejado.
“Acreditamos que este tipo de projeto de robô pode ser adaptado a muitas aplicações”, diz Barhydt. “Também estamos pensando em aplicar isso à indústria pesada e em coisas como automatizar a operação de guindastes em portos e armazéns.”
Este trabalho foi apoiado, em parte, pela Nationwide Science Basis e pela Ford Basis.

Notícias do MIT