Em vez de ir para o tempo e o problema de projetar e construir pequenos robôs do zero, alguns cientistas agora estão transformando insetos existentes em ciborgues de controle remoto. Uma nova “linha de montagem” pode ajudar, convertendo baratas em ciborgues muito mais rápido do que pode ser feito manualmente.
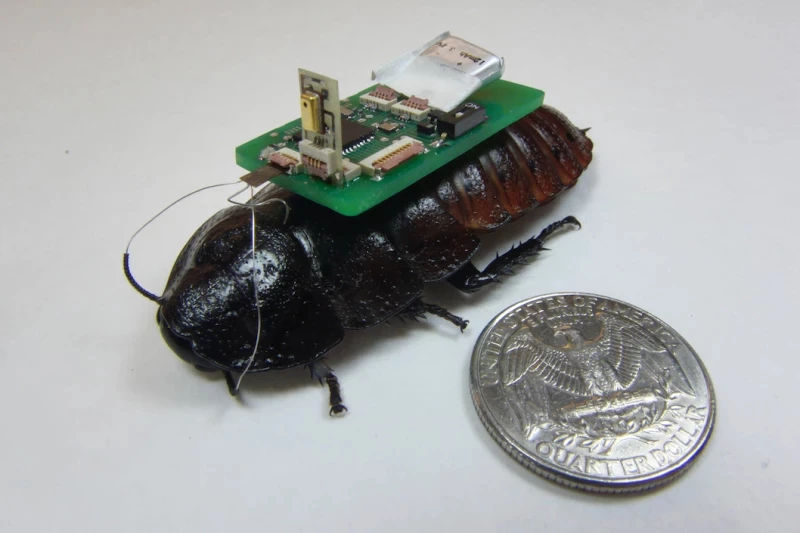
Simplificando, Insetos Cyborg Normalmente consistem em um inseto grande-geralmente uma barata sibilante de Madagascar-que foi equipada com uma pequena mochila eletrônica. Os eletrodos controlados remotamente nessa mochila estimulam partes do corpo, como as antenas ou olhos do inseto, fazendo com que ele inicie e pare de caminhar e vire à esquerda ou à direita.
E não, a coisa toda não é apenas um exercício de curiosidade mórbida.
Um dos principais usos propostos para esses cyborgs é procurar sobreviventes presos sob escombros em locais de desastre. Uma barata equipada com câmera de controle remoto poderia se espremer por lacunas impossíveis de de outra forma nos detritos, transmitindo imagens ao vivo e as coordenadas de quaisquer sobreviventes que ela aparece.
Eric Whitmire
Para uma tarefa tão em larga escala, no entanto, apenas algumas baratas ciborgues não seriam suficientes.
Prevê -se que grandes grupos de insetos sejam implantados em todos os escombros, possivelmente até coordenando suas rotas de pesquisa por meio de comunicação sem fio entre as mochilas. Se as rotas de dois ciborgues estivessem sobrepostas, por exemplo, suas mochilas poderiam evitá -las.
Para tornar essa tecnologia prática e viável, as baratas não podem ser minuciosamente convertidas à mão … elas precisam ser eliminadas rapidamente por meio de um processo automatizado. É aí que entra a linha de montagem.
Universidade Tecnológica de Nanyang
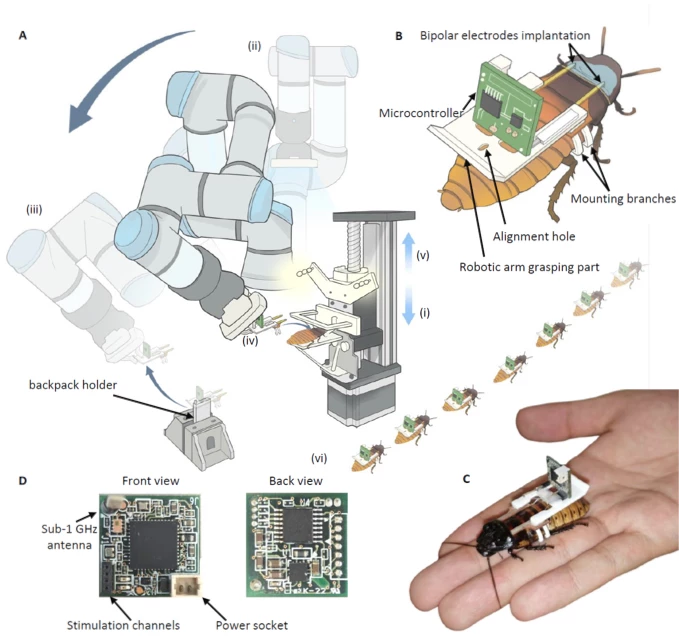
Desenvolvido por Prof. Hirotaka Sato E colegas da Universidade Tecnológica de Nanyang de Cingapura, o sistema controlado por computador incorpora uma plataforma para manter o inseto no native, uma câmera detectada à profundidade da Intel RealSense e um braço robótico UR3E com uma garra robótica guide.
Depois que uma barata anestesiada é protegida na plataforma, um motor desliza que a monta em posição e um sistema de visão computacional avalia o tamanho e a posição do corpo do inseto. Uma seção da cutícula externa da barata é então puxada para trás, revelando uma membrana entre seus segmentos de corpo pronoto e mesotórax.
Em seguida, uma mochila pré-montada de 2,3 gramas é abaixada no inseto e dois eletrodos bipolares na frente dessa embalagem são implantados nos lados esquerdo e direito da membrana exposta. A mochila principal é então pressionada suavemente no mesotórax da barata até que ela se prende no lugar. Em uma etapa ultimate, a plataforma desliza de volta e o inseto ainda anestesiado é liberado.
Universidade Tecnológica de Nanyang
Todo o processo leva 68 segundos por barata, em comparação com 15 minutos a uma hora ao executar a mesma tarefa manualmente. E em testes realizados em baratas ciboráticas de linha de montagem e montadas manualmente, os dois grupos foram encontrados com o desempenho semelhante em tarefas de controle remoto, como seguir um caminho em forma de S e explorar o terreno obstruído.
Como um bônus adicional para os insetos (e para as baterias das mochilas), essa configuração específica do cyborg requer apenas 40% do tempo de estimulação e 75% da tensão de estimulação usada em sistemas semelhantes. E sim, a mochila pode ser removida entre missões.
“Nossa inovação torna o sonho de implantar um grande número de insetos cyborg em cenários da vida actual muito mais práticos”, diz Sato. “Ao automatizar o processo, podemos produzir robôs de insetos-híbridos de maneira rápida e consistente. Isso nos permitirá prepará-los em grande número, o que será crítico em operações sensíveis ao tempo, como pesquisa e salvamento pós-desastre”.
Um artigo sobre a pesquisa foi publicado recentemente na revista Comunicações da natureza.