
Os controladores de movimento da série N dos dispositivos de desempenho de Desempenho ajudam o AMR empoeirado a evitar obstáculos, bordas e outros perigos. | Fonte: Robótica empoeirada
A indústria da construção está sob pressão. A escassez de mão -de -obra, o aumento dos custos de materiais e a demanda por velocidade e precisão estão pressionando os construtores a buscar soluções automatizadas que aumentem a eficiência, a segurança e a sustentabilidade. A Dusty Robotics espera usar sua tecnologia para mudar isso.
Na maioria dos casos, os planos são marcados em espaços físicos usando meios antiquados: dependendo do web site, o pessoal pode usar um Estação complete (Um instrumento de pesquisa que integra várias ferramentas de medição) ou talvez apenas fitasse medidas e linhas de giz para marcar para onde as coisas vão. A abordagem praticamente inalterada daqueles usados séculos atrás.
Enormes pilhas de cópias impressas em plano detalhando cada piso e sistema estão cedendo lentamente às comunicações digitais, mas a informação ainda é comunicada manualmente no native, explicou Mike Thompson, engenheiro principal da Dusty Robotics. Então, com muita frequência, o modelo 3D de um edifício não é o que é construído. Como vários negócios apresentam seus planos, erros e informações desatualizadas geralmente levam a layouts, retrabalhos e atrasos incorretos.
Dusty Robotics Designs The FieldPrinter 2
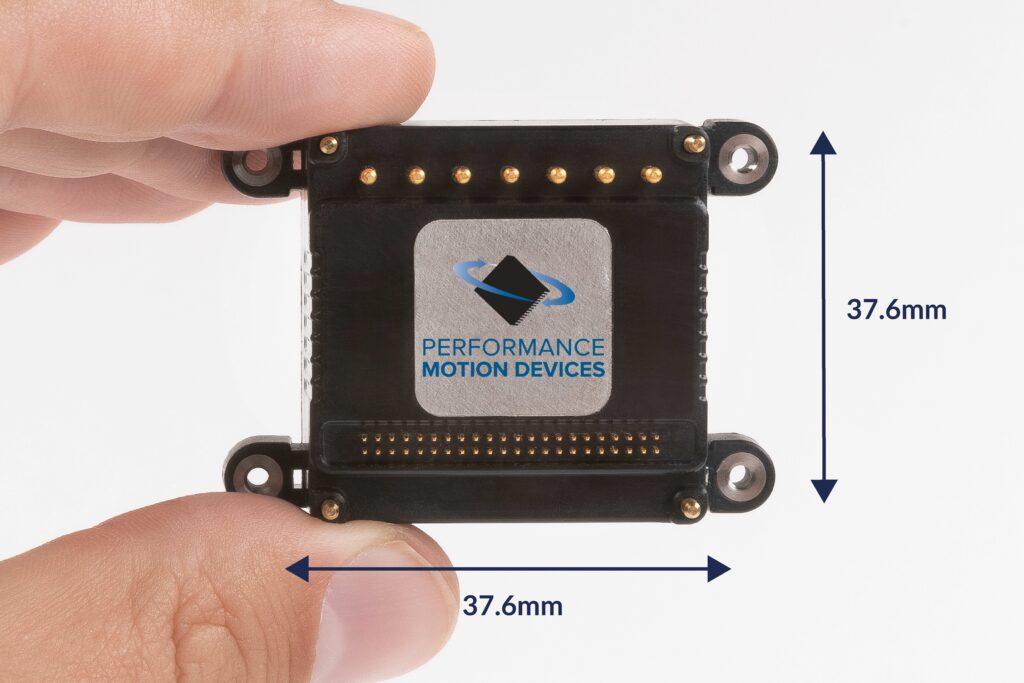
A unidade de controle de movimento de íons/CME N transmite o design empoeirado com o controle necessário para uma operação automatizada precisa. | Fonte: Dispositivos de movimento de desempenho
A startup Dusty Robotics, com sede em Mountain View, Califórnia, projetou um robô móvel autônomo (Amr) chamado de FieldPrinter 2 para mapear e marcar independentemente os projetos de construção 3D para 2D construção pisos com 0,0625 pol. precisão. Com ele, as equipes de construção não precisam mais verificar constantemente seus laptops, iPads e planos de papel para saber o que deve ser construído e onde.
Núcleo para a função da AMR são dois Controle de movimento componentes de dispositivos de movimento de desempenho (PMD). O Ion/CME N-Collection As unidades fornecem controle e energia para as duas rodas dianteiras da AMR e, mais especificamente, os dois motores elétricos DC sem escova (BLDCs) acionam as rodas. A roda traseira da AMR não possui acionamento ativo.
O controlador dirige posiciona o robô, juntamente com uma suíte de bordo sensores que fornecem informações precisas de localização, incluindo rastreadores, codificadores e giroscópios da unidade de medição inercial.
“Queremos movimento contínuo entre todos os objetos que imprimimos”, disse Ryan Dimick, controla o engenheiro da Dusty Robotics. O sistema deve permitir alterações constantes de perfil à medida que o robô muda entre navegar e imprimir. ”
De fato, o novo FieldPrinter 2 AMR melhora em uma iteração anterior com a ajuda dos Drives de controlador PMD. O uso da primeira iteração dos controladores de movimento de outro fornecedor criou desafios para o comeceOs desenvolvedores, incluindo a incapacidade de entender e corrigir erros sem soluções alternativas. A nova solução controladora-Drive aborda esses problemas e se encaixa na plataforma existente.
Mais especificamente, o controlador de eixo único montável em PCB transmite controle de movimento de alto desempenho, conectividade de rede e amplificação para uma unidade all-in-one com um processador interno. Portanto, o robô pode baixar e executar o código. Além disso, os controladores-traives oferecem visibilidade e personalização empoeiradas de robótica.
“Quando encontramos um problema, sempre period algo que poderíamos consertar”, disse Dimick. “Nós superamos as latências que tínhamos no passado e realmente estabelecemos nossas próprias características de tempo para os motores e controle motor”.
Por exemplo, Dusty queria poder modificar o loop de controle e os parâmetros de loop de controle orientados a campo, acrescentou.
“(Dimick) está constantemente puxando dados em planilhas, gráficando -os e analisando todas as entradas e saídas para o controlador do motor – e entendendo quais pequenos ajustes precisamos”, explicou Thompson. “Essa capacidade de alinhar gráficos com suas expectativas – isso foi um grande desafio antes”.
Dimick acrescentou: “Estamos trabalhando em uma escala de tempo de nível milissegundos. Obter informações muito rapidamente é importante para todos os controles de ajuste e de alto nível, e não fomos capazes de alcançar isso antes do PMD”.
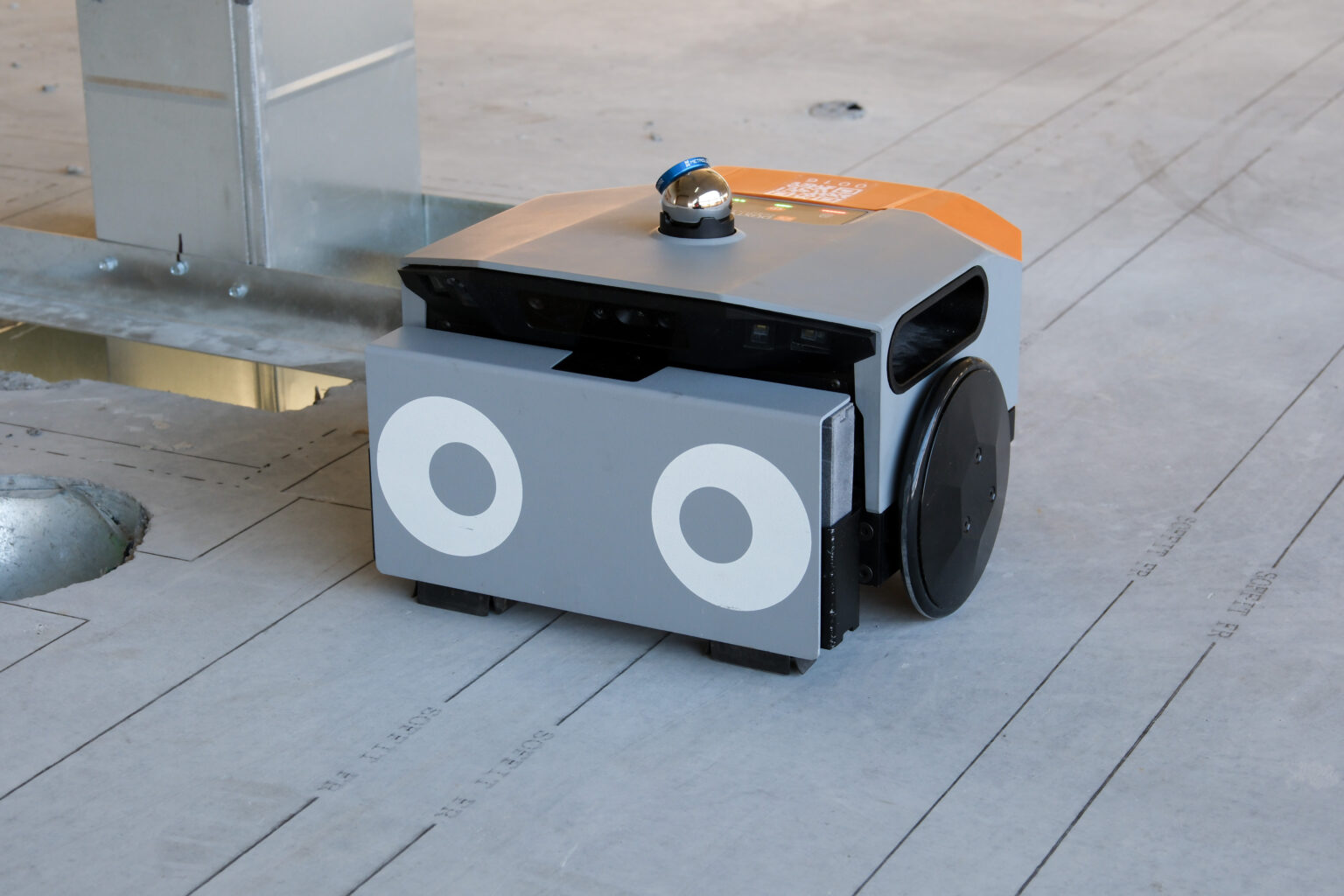
A unidade de controle de movimento da série ION/CME da PMD é elementary para a precisão da posição do robô. As unidades N-Collection do PMD também dão aos engenheiros acesso aos parâmetros de controle interno para personalizar e solucionar problemas do design. | Fonte: Robótica empoeirada
PMD ajuda os casos de borda a resolver empoeirados
A robótica empoeirada colaborou de perto com o fornecedor controlador-drive para resolver desafios. “Sempre que eu estava integrando o controlador no produto e tinha dúvidas, eles foram rápidos em pular em uma chamada e até lançaram uma versão de depuração personalizada para eu usar temporariamente para diagnosticar um problema”, disse Dimick.
Essa colaboração também informou a opção de comunicação industrial do fabricante da AMR.
O controlador A unidade suporta comunicação through Ethernet, CAN, RS-232, RS-485 e interface periférica serial. Dusty queria certas comunicações em uma versão um pouco posterior do controlador-drive.
“Então, esperamos e acho que fomos um dos primeiros a realmente usá -lo”, lembrou. “Então ajudamos (o fornecedor) a depurar o firmware e eles rapidamente devolveram novas versões para usarmos”.
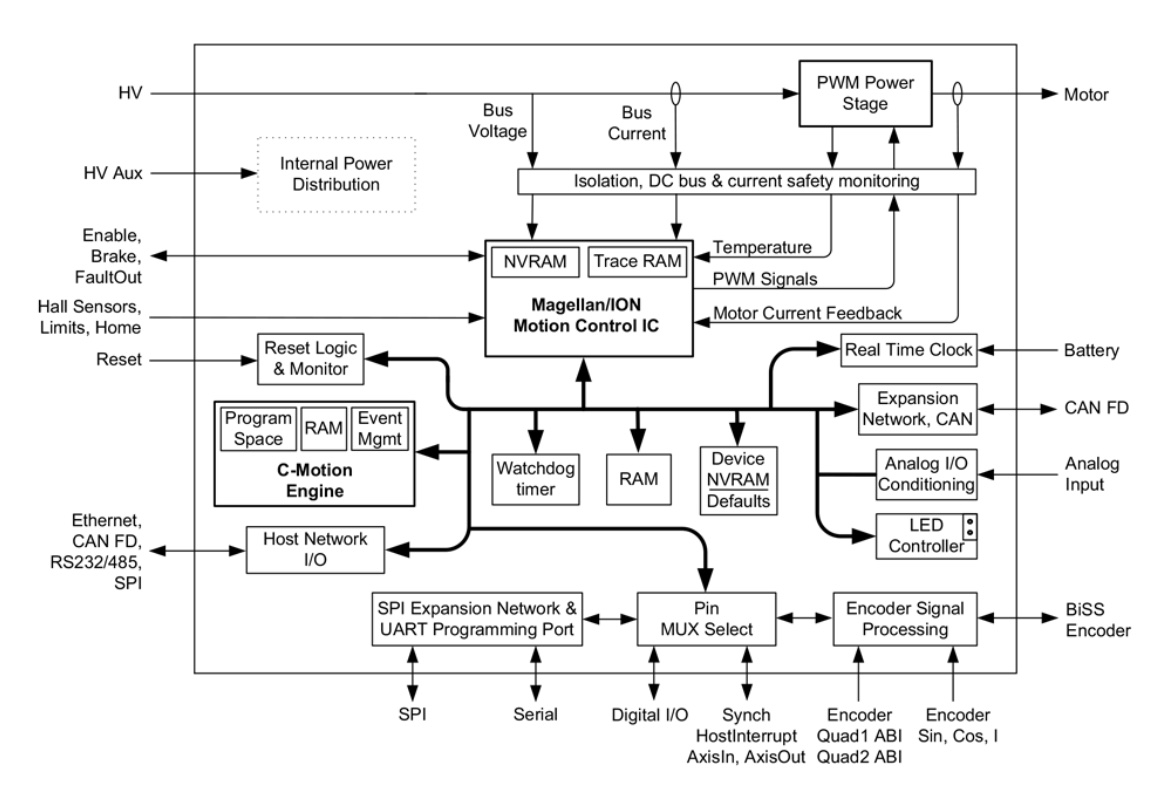
Um diagrama preto do íon PMD N-Collection. | Fonte: Dispositivos de movimento de desempenho
O Dusty FieldPrinter 2 possui um rastreador a laser que relata continuamente a posição da AMR – mas muitas vezes o rastreador não tem uma visão do robô, portanto a operação é cega. Mas o controlador-drive (em conjunto com os sensores do robô) mantém o AMR no caminho certo.
“Quando o robô está imprimindo dentro de um ponto cego, não visível para o rastreador, ele confia na unidade de medição inercial e nos codificadores que estão passando pelo controlador. Ele depende de todos os outros sensores por cinco, 10, 15 segundos de impressão contínua”, explicou Thompson. “Então, quando sai do ponto cego, ele diz ao rastreador exatamente onde está. Precisamos dar a esse rastreador a precisão para que possa adquirir muito rapidamente e precisamente o sinal”.
Aqui, a precisão do tempo de sub-milissegundos ajuda os pontos cegos AMR a lidar tão comuns em locais de trabalho desordenados. “Essa informação e o movimento previsível suave permitem que o AMR estime com precisão sua localização e proceed imprimindo sem linha de visão para o rastreador a laser”, disse Dimick. Essa impressão de ponto cego é a maior melhoria da nova versão AMR.
O controlador-Drive também pode aplicar um freio eletrônico aos motores da AMR. Um pouco de software program de Dusty, executando em um dos chips do controlador, serve como um cão de guarda. Se perder a comunicação com o robô, ele alimenta os motores.
Como o nome da empresa indica, o sistema da Dusty Robotics deve operar em ambientes sujos e em todos os tipos de clima -no Sol do Arizona, bem como no 14º andar de um edifício de Chicago em construção quando é -20 ° F -e com obstáculos desconhecidos e conectividade de Web irregular.
Diferentemente das soluções concorrentes que deixam expostos eletrônicos sensíveis expostos, o PMD disse que o controlador-drive usado no FieldPrinter 2 vem padrão com um pacote fechado para proteger os componentes internos. Iterações futuras do robô podem ver níveis mais altos de integração.
“O PMD fornece um caminho para nós”, disse Thompson. “Eles fornecem os próprios controladores e podem abrir seus controladores e nos dar acesso às peças independentes para nos permitir criar uma solução altamente integrada”.
“É algo que realmente não perseguimos, mas nos permite preservar o investimento que os engenheiros fizeram … e ainda tornam o sistema mais rápido e mais leve do que é hoje”, acrescentou.
 Sobre o autor
Sobre o autor

Chuck Lewin é o fundador e CEO da Efficiency Movement Dispositics. Lançado em 1992, o PMD está sediado perto de Boston. É um desenvolvedor da tecnologia de controle de movimento para ciências da vida, robótica e automação industrial. O PMD fornece uma ampla gama de produtos avançados de controle de movimento eletrônico, incluindo circuitos integrados, amplificadores digitais, unidades digitais e placas para uma base mundial de clientes.
Nota do editor: Este artigo foi sindicado de O relatório do robô web site de irmãosAssim, Dicas de controle de movimento.