Think about que você está ferido em uma trilha remota na montanha, mas conseguiu contatar o resgate de emergência. O primeiro a chegar à cena pode ser um pequeno robô humanoide usando um jetpack se a pesquisa italiana der frutos.
O projeto do grupo de Inteligência Synthetic e Mecânica do Instituto Italiano de Tecnologia (Istituto Italiano di Tecnologia) pegou um bípede infantil projetado para pesquisa de IA – o iCub – e pretende fazê-lo decolar usando propulsão a jato.
Além de prender um pacote de jato duplo em suas costas, a equipe também sacrificou as mãos flexíveis e humanas do robô unique em favor de JetCats mais cuspidores de fogo. Os pesquisadores dizem que o empuxo atinge o máximo em 1.000 N (cerca de 225 lbf) e as temperaturas de exaustão podem chegar a 800 °C (1.472 °F).
iRonCub3: prévia: área experimental e validações preliminares
O iRonCub3 inspirado em Tony Stark recebeu uma nova coluna de titânio desenvolvida para ajudá-lo a lidar com as forças em jogo e teve capas resistentes ao calor aplicadas em vez de um traje externo descolado em um protótipo anterior. Novos componentes eletrônicos foram projetados, sensores de força-torque foram instalados no jetpack e componentes foram removidos para dar lugar ao sistema atualizado.
Como você pode ver no vídeo acima, o projeto ainda está nos estágios iniciais de desenvolvimento, mas a equipe já testou o humanoide movido a jato em um túnel de vento para validar simulações aerodinâmicas. Mas mesmo que os jatos tenham sido energizados várias vezes, o iRonCub3 ainda não decolou de fato – no entanto, a equipe diz que está confiante de que a habilidade de pairar será alcançada em breve.
Em outros lugares, algoritmos de controle de voo foram desenvolvidos e analisados, e um planejador de trajetória foi validado em simulações. A equipe está atualmente trabalhando na “estimativa da posição e orientação do robô no espaço” usando dados de sua unidade de medição inercial e câmera de profundidade Actual Sense baseada no peito.
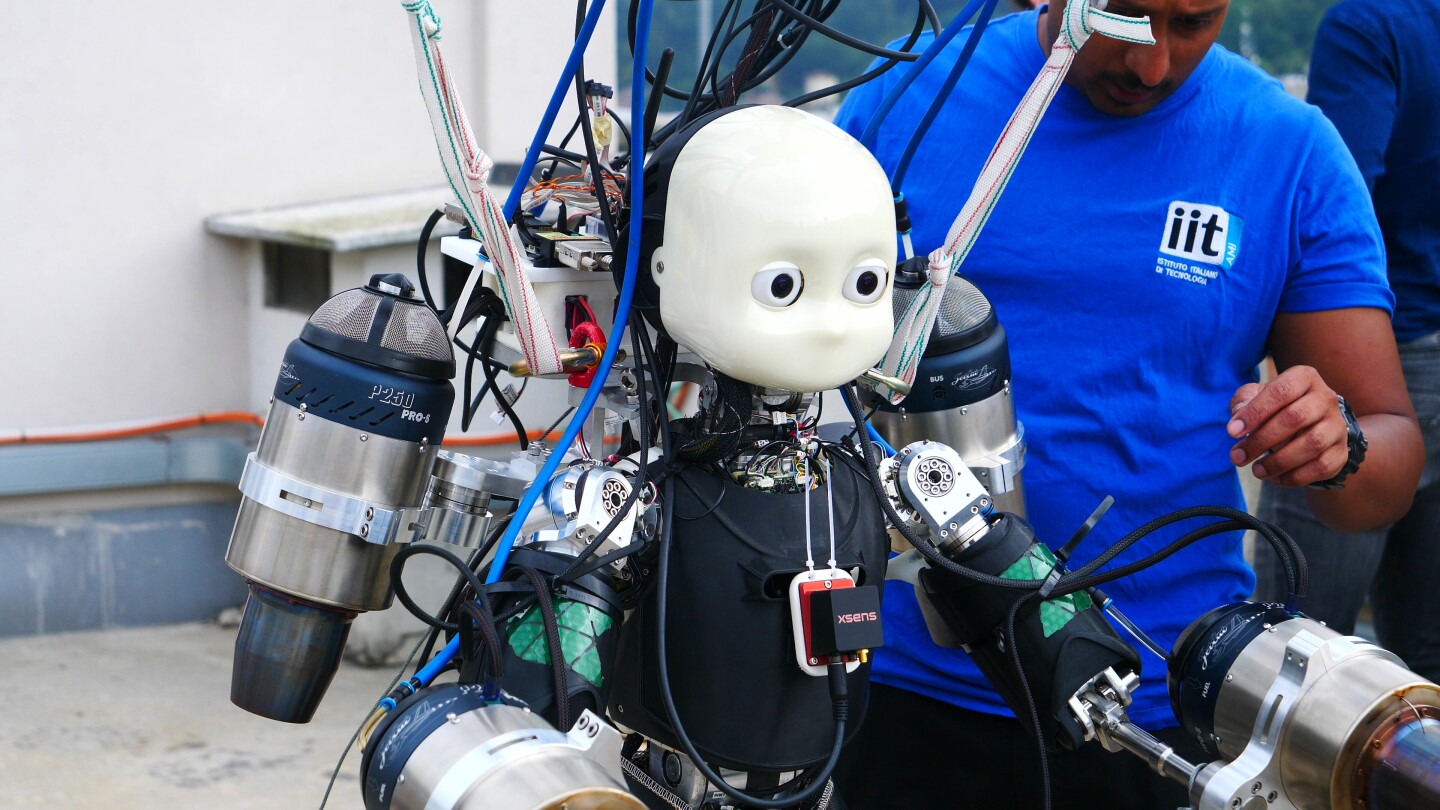
Instituto Italiano de Tecnologia
“A complexidade deste eixo de pesquisa difere muito dos desafios clássicos da robótica humanoide”, observaram os pesquisadores. “A termodinâmica desempenha um papel basic, já que o gás de emissão da turbina está a cerca de 800 graus Celsius e quase na velocidade do som; a aerodinâmica de sistemas multicorpos precisa de redes neurais com componentes informados pela física para serem avaliados on-line; as configurações do controlador precisam combinar atuadores de alta e baixa largura de banda como juntas e turbinas; os planejadores são obrigados a gerar não apenas a dinâmica do motor, mas também as trajetórias da turbina. A validação experimental é tão séria quanto perigosa, então há pouco espaço para improvisações.”
O objetivo ultimate é ter humanoides que possam voar para um native de desastre/emergência para realizar inspeções aéreas ou fornecer dados-chave a pessoal remoto. Mas também será capaz de pousar e andar por aí, passar por obstáculos, subir escadas, abrir portas e assim por diante. Como sugerido anteriormente, isso pode ser útil para resgates de primeira hora, mas também para inspecionar prédios ou infraestrutura perigosos.