
Nesta série de entrevistas, estamos encontrando alguns dos Consórcio de doutorado AAAI/SIGAI participantes para descobrir mais sobre suas pesquisas. Nesta última entrevista, Haimin Hu nos conta sobre sua pesquisa sobre os fundamentos algorítmicos da autonomia centrada no ser humano e seus planos para projetos futuros, e dá alguns conselhos para os estudantes de doutorado que desejam dar o próximo passo em sua carreira.
Você poderia nos dar uma visão geral da pesquisa que você realizou durante o seu doutorado?
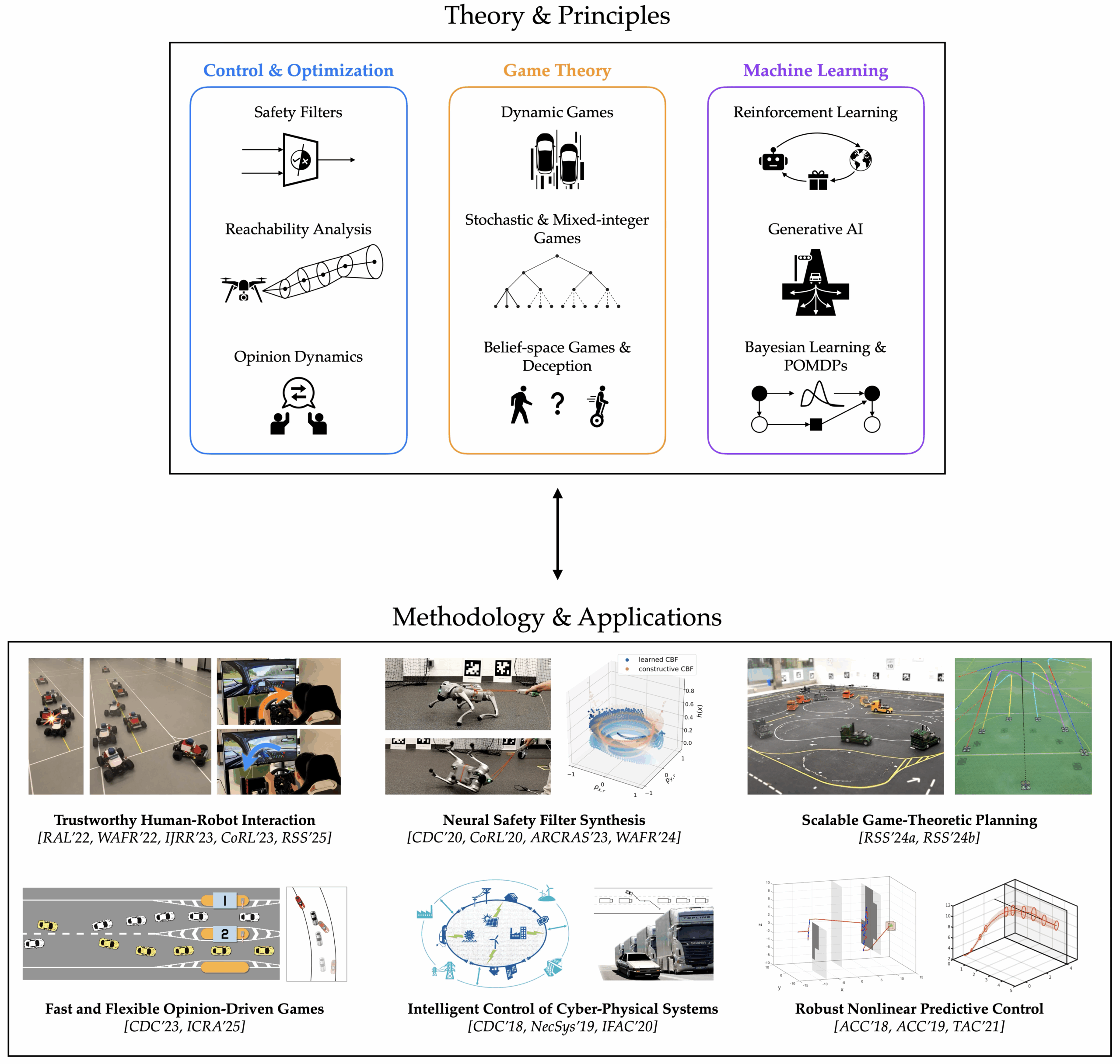
Minha pesquisa de doutorado, conduzida sob a supervisão do professor Jaime Fernández Fisac no Princeton Protected Robotics Labconcentra-se nos fundamentos algorítmicos da autonomia centrada no ser humano. Ao integrar a teoria dinâmica dos jogos com o aprendizado de máquina e o controle crítico da segurança, meu trabalho visa garantir sistemas autônomos, de veículos autônomos a drones e robôs quadrúpedes, são performáticos, verificáveis e confiáveis quando implantados no espaço povoado humano. O princípio central da minha pesquisa de doutorado é planejar o movimento dos robôs no espaço conjunto dos estados físicos e da informação, garantindo ativamente a segurança à medida que navegam em ambientes incertos e em mudança e interagem com os seres humanos. Sua principal contribuição é um unificado Estrutura algorítmica – apoiada pela teoria dos jogos – que permite que os robôs interajam com segurança com seus colegas humanos, se adaptem às preferências e objetivos humanos e até ajudem os humanos a refinar suas habilidades. Especificamente, meu trabalho de doutorado contribui para as seguintes áreas em autonomia centrada no ser humano e sistemas multi-agentes:
- Interação humana -robot confiável: Planejando trajetórias de robô seguras e eficientes, fechando o loop de computação entre a interação física-robô física e o aprendizado do tempo de execução que reduz a incerteza do robô sobre o humano.
- Análise de segurança neural verificável para sistemas robóticos complexos: Aprendendo controladores neurais robustos para robôs com dinâmica de alta dimensão; Garantindo sua convergência no tempo de treinamento e segurança em tempo de implantação.
- Planejamento interativo escalável sob incerteza: Síntese de políticas de controle da teórica do jogo para sistemas humanos-robôs complexos e incertos em escala.
Houve um projeto (ou aspecto de sua pesquisa) que foi particularmente interessante?
A segurança na interação humana-robot é especialmente difícil de definir, porque depende de uma pergunta quase sem resposta: Quão seguro é seguro o suficiente quando os humanos podem se comportar de maneiras arbitrárias? Para dar um exemplo concreto: é suficiente se um veículo autônomo pode evitar atingir um ciclista caído em 99,9% do tempo? E se essa taxa só puder ser alcançada pelo veículo sempre parando e esperando o humano sair do caminho?
Eu argumentaria que, para a implantação confiável de robôs no espaço povoado humano, precisamos complementar os métodos estatísticos padrão com garantias de segurança robustas claras sob um examinado Conjunto de condições de operação tão bem estabelecidas quanto as de pontes, usinas de energia e elevadores. Precisamos de aprender o tempo de execução para minimizar a perda de desempenho do robô causada por manobras de imposição de segurança; Isso exige algoritmos que podem reduzir a incerteza inerente ao robô Induzido por seus colegas humanos, por exemplo, sua intenção (um motorista humano quer se fundir, cortar atrás ou permanecer na pista?) Ou resposta (se o robô se aproximar, como o humano reagirá?). Precisamos Feche o loop Entre o aprendizado e a tomada de decisões do robô, para que possa otimizar a eficiência, antecipando como sua interação contínua com o humano pode afetar a incerteza em evolução e, finalmente, seu desempenho a longo prazo.
O que fez você querer estudar IA e a área de sistemas robóticos centrados em humanos em explicit?
Fico fascinado por robótica e sistemas inteligentes desde a infância, quando passava dias inteiros assistindo anime de ficção científica como Cellular Go well with Gundam, Neon Genesis Evangelionou FORMA FORMULA DE CIBO GPX FUTURA. O que me cativou não period apenas a tecnologia futurista, mas a visão da IA como um verdadeiro parceiro – aumentando as habilidades humanas em vez de substituí -las. Fórmula cibernética Em explicit, plantou a idéia de co-evolução humana-AI em minha mente: um co-piloto de IA que não apenas ajuda um motorista humano a navegar em ambientes de alta velocidade e alto risco, mas também se adapta ao estilo do motorista ao longo do tempo, tornando o humano um piloto melhor e aprofundando a confiança mútua ao longo do caminho. Hoje, durante minha colaboração com o Toyota Analysis Institute (TRI), trabalho em sistemas de robótica centrados no ser humano que incorporam esse princípio: projetar sistemas de IA que colaboram com pessoas em ambientes dinâmicos e críticos de segurança, alinhando-me rapidamente com a intenção humana por meio de insumos multimodais, que, desde a assistência física, para a minha linguagem e o suggestions da vida.
Você conseguiu uma posição no corpo docente na Johns Hopkins College (JHU) – Parabéns! Você poderia falar um pouco sobre o processo de busca de empregos e talvez compartilhar alguns conselhos e insights para estudantes de doutorado que podem estar em um estágio semelhante em sua carreira?
A busca de emprego foi definitivamente intensa, mas também profundamente gratificante. Meu conselho para estudantes de doutorado: comece a pensar cedo sobre o tipo de a longo prazo Impacto que você deseja causar e agir no início do seu pacote de aplicativos e conversas no trabalho. Além disso, converse com as pessoas, especialmente seus colegas e colegas seniores no mercado de trabalho. Eu pessoalmente me beneficiei muito com os seguintes recursos:
Você tem uma idéia dos projetos de pesquisa em que estará trabalhando na JHU?
Desejo ajudar a criar um futuro em que os humanos possam abraçar inquestionavelmente a presença de robôs ao seu redor. Para essa visão, meu laboratório da JHU investigará os seguintes tópicos:
- Planejamento interativo de movimento interativo da incerteza: Como os robôs podem planejar um movimento seguro e eficiente, contabilizando sua incerteza em evolução, bem como sua capacidade de reduzi -lo por meio de interação futura, detecção, comunicação e aprendizado?
- Co-Evolução Humana-AI e co-adaptação: Como os sistemas de IA incorporados podem aprender com os colegas de equipe humanos, ajudando -os a refinar as habilidades existentes e adquirir novas de maneira segura e personalizada?
- Autonomia segura compatível com o ser humano: Como os sistemas autônomos podem garantir a segurança prescrita enquanto permanecem alinhados com os valores humanos e sintonizados com as limitações cognitivas humanas?
- Tomada de decisão estratégica escalável e generalizável: Como os sistemas de vários robôs podem tomar decisões coordenadas e seguras em ambientes dinâmicos e povoados humanos?

Como foi a experiência do consórcio de doutorado AAAI?
Tive o privilégio de participar do consórcio de doutorado de 2025 AAAI, e foi uma experiência incrivelmente valiosa. Sou especialmente grato aos organizadores por curar um ambiente tão atencioso e solidário para os pesquisadores em primeira carreira. O destaque para mim foi a sessão de orientação com o Dr. Ming Yin (PostDoc em Princeton, agora faculdade da Georgia Tech CSE), cujas informações sobre a navegação no mercado de trabalho incertas e competitivas eram encorajadoras e reveladoras.
Você poderia nos contar um fato interessante (não relacionado a AI) sobre você?
Eu sou apaixonado por esqui. Aprendi a esquiar principalmente por imitação baseada na visão, aprendendo com um teleférico, embora eu esteja definitivamente pagando o preço agora pela baixa generalização! Um dia, espero construir um exoesqueleto que me ensine a esquiar melhor, mantendo -me seguro nos diamantes pretos duplos.
Sobre Haimin
 | Haimin Hu é um professor assistente de ciência da computação na Universidade Johns Hopkins, onde também é membro do Ciência de Dados e Instituto AIo Instituto de autonomia garantidae o Laboratório para detecção computacional e robótica. Sua pesquisa se concentra nos fundamentos algorítmicos da autonomia centrada no ser humano. Ele recebeu vários prêmios e reconhecimentos, incluindo uma robótica 2025: pioneira em ciências e sistemas, uma estrela em ascensão dos sistemas ciber-física de 2025 e um pioneiro de interação humano-robô 2024. Além disso, ele serviu como editor associado para IEEE Robótica e cartas de automação Desde seu quarto ano como estudante de doutorado. Ele obteve um doutorado em engenharia elétrica e de computadores pela Universidade de Princeton em 2025, um MSE em engenharia elétrica pela Universidade da Pensilvânia em 2020 e em engenharia eletrônica e de informação pela Shanghaitech College em 2018. |

AiHub
é uma organização sem fins lucrativos dedicada a conectar a comunidade de IA ao público, fornecendo informações gratuitas e de alta qualidade na IA.
O AiHub é uma organização sem fins lucrativos dedicada a conectar a comunidade de IA ao público, fornecendo informações gratuitas e de alta qualidade na IA.

Lucy Smith é editora -gerente da AiHub.