Um novo robô com rodas é capaz de escalar estruturas metálicas de uma maneira muito inteligente e única – ele usa uma fita métrica extensível. Os descendentes do bot podem um dia encontrar utilidade para inspecionar ou até mesmo consertar coisas como torres, pontes, usinas de energia e navios.
Embora nós ter visto outros robôs que podem subir em superfícies metálicas verticais, a maioria deles utiliza uma combinação de sistemas de vácuo e rodasou pernas com pés magnéticos. No entanto, os primeiros bots muitas vezes não conseguem superar obstáculos relativamente pequenos, enquanto os últimos tendem a se mover lentamente e mecanicamente complexos.
É aí que o EEWOC (Prolonged-reach Enhanced Wheeled Orb for Climbing) foi projetado para entrar. O robô experimental foi criado por Justin Quan, Mingzhang Zhu e Dennis Hong do Laboratório de Robótica e Mecanismos da UCLA (RoMeLa).
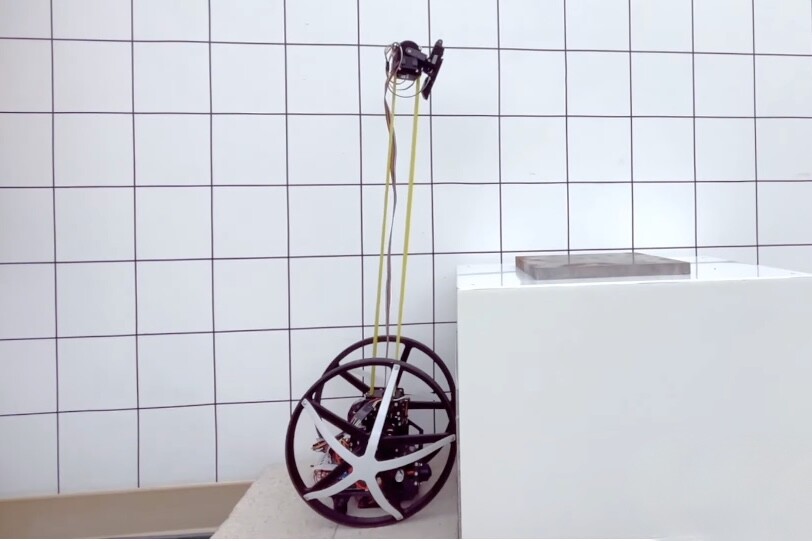
Quando está no chão ou em outras superfícies horizontais, o robô com equilíbrio automático rola sobre suas duas rodas. Porém, quando chega a hora de escalar, o EEWOC estende verticalmente algo conhecido como membro EEMMa (Mecanismo de Extensão Elástica para Mobilidade e Manipulação).
Romela
Este dispositivo incorpora um carretel motorizado de fita métrica de steel localizado dentro do corpo do robô. A própria fita se estende para fora do robô, dobra-se para formar um formato de U de cabeça para baixo e, em seguida, desce para ser ancorada no topo do bot.
Na curva do U invertido, a fita passa por uma polia dentro de uma ferramenta “efetora closing”. Entre outras coisas, esta ferramenta incorpora um eletroímã de ângulo ajustável montado na parte superior.
Para escalada direta, o EEMMMa começa estendendo sua fita. Isso faz com que o membro se alongue (até um alcance máximo de 1,2 m/3,9 pés), com a ferramenta atuadora closing sempre permanecendo na curva na parte superior. O ímã dessa ferramenta agarra o steel, após o que o robô se levanta para a ferramenta simplesmente enrolando a fita de volta no carretel. Quando o EEMMMa é liberado e estendido novamente para a próxima etapa da subida, o robô permanece no lugar na estrutura metálica usando um ímã próprio montado na parte inferior.

Romela
Para subir e contornar bordas, o EEMMMa ainda estende sua fita, mas o atuador closing aplica essencialmente um freio, evitando que a fita se mova através dela. Isso faz com que a fita se enrole e dobre em um ângulo reto, permitindo que o ímã atinja seu alvo que de outra forma seria inacessível. O bot então se aproxima do ímã, rolando pela borda no processo.
Este vídeo fornece uma explicação mais detalhada de como o membro funciona – o artigo continua abaixo dele.
Novo membro robótico de extensão e flexão EEMMMa – ASME JMR 2022 Visão geral de 2 minutos
Na sua forma atual, o EEWOC tem um diâmetro de 260 mm (10,2 pol.) E pesa apenas 2,1 kg (4,6 lb). O robô também tem uma velocidade máxima de escalada de 0,24 metros por segundo (0,79 pés/s), tornando-o um dos robôs de escalada mais rápidos já feitos.
Os planos futuros incluem equipar o bot com vários EEMMMa que podem ser estendidos em diferentes direções para movimento omnidirecional. Os cientistas também prevêem a utilização de pinças EEMMMa não magnéticas que podem, em vez disso, agarrar superfícies como árvores ou paredes.
Você pode ver o robô em ação de escalada em steel, no vídeo abaixo – a coisa pode até ser vista balançando em aberturas horizontais, no estilo Indiana Jones. Artigos tanto sobre EEWOC e o EEMMMa foram apresentados nas conferências técnicas de engenharia de design internacional ASME 2023 e na conferência de computadores e informações em engenharia.
Um robô escalador com membro de fita métrica longo que se estende e dobra – EEWOC
Fonte: Romela através de Espectro IEEE