 Crédito da foto: Jeff Fitlow/Rice College
Crédito da foto: Jeff Fitlow/Rice College
Por Silvia Cernea Clark
Pesquisadores da Rice College desenvolveram um braço robótico suave, capaz de realizar tarefas complexas, como navegar em torno de um obstáculo ou acertar uma bola, guiadas e alimentadas remotamente por vigas a laser sem eletrônicos ou fiação a bordo. A pesquisa pode informar novas maneiras de controlar dispositivos cirúrgicos implantáveis ou máquinas industriais que precisam lidar com objetos delicados.
Em um estudo de prova de conceito que integra materiais inteligentes, aprendizado de máquina e um sistema de controle óptico, uma equipe de pesquisadores de arroz liderados pelo cientista de materiais Hanyu Zhu Usou um dispositivo de padronização de luz para induzir com precisão o movimento em um braço robótico feito de elastômero de cristal líquido de azobenzeno ⎯ Um tipo de polímero que responde à luz.
De acordo com o estudo Publicado na Superior Clever Methods, o novo sistema robótico incorpora uma rede neural treinada para prever o padrão de luz exato necessário para criar movimentos específicos do ARM. Isso facilita para o robô executar tarefas complexas sem precisar de entrada igualmente complexa de um operador.
“Esta foi a primeira demonstração de controle automatizado em tempo actual, reconfigurável e automatizado sobre um materials responsivo à luz para um braço robótico macio”, disse Elizabeth Blackert, alumna de doutorado com arroz que é o primeiro autor do estudo.
 Elizabeth Blackert e Hanyu Zhu (Crédito da foto: Jeff Fitlow/Rice College).
Elizabeth Blackert e Hanyu Zhu (Crédito da foto: Jeff Fitlow/Rice College).
Os robôs convencionais normalmente envolvem estruturas rígidas com elementos móveis, como dobradiças, rodas ou garra para permitir uma amplitude de movimento predefinida e relativamente restrita. Os robôs suaves abriram novas áreas de aplicação em contextos como medicina, onde é necessária a interação com segurança com objetos delicados. Os chamados robôs contínuos são um tipo de robô macio que renuncia às restrições de mobilidade, permitindo o movimento adaptativo com um grau de liberdade amplamente expandido.
“Um grande desafio no uso de materiais suaves para robôs é que eles estão amarrados ou têm funcionalidade muito simples e predeterminada”, disse Zhu, professor assistente de ciência e nanoengenharia de materiais. “Construir robôs suaves de maneira remota e arbitrariamente programável requer uma mistura única de especialização envolvendo o desenvolvimento de materiais, o design do sistema óptico e as capacidades de aprendizado de máquina. Nossa equipe de pesquisa period adequada para assumir esse trabalho interdisciplinar”.
A equipe criou uma nova variação de um elastômero que encolhe sob a luz azul a laser e depois relaxa e recorrer ao escuro-um recurso conhecido como tempo de relaxamento rápido que torna possível o controle em tempo actual. Ao contrário de outros materiais sensíveis à luz que requerem luz ultravioleta prejudicial ou levam minutos para redefinir, este funciona com comprimentos de onda mais seguros e mais longos e responde em segundos.
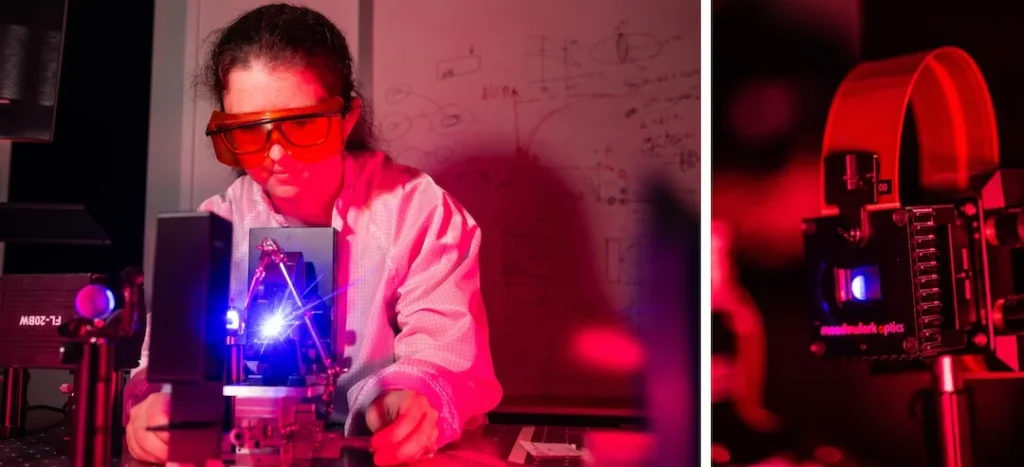
“Quando brilhamos um laser em um lado do materials, o encolhimento faz com que o materials se dobre nessa direção”, disse Blackert. “Nosso materials se curva em direção à luz do laser como uma haste de flor em relação à luz do sol.”
Para controlar o materials, os pesquisadores usaram um modulador de luz espacial para dividir um único feixe de laser em várias feixes, cada uma direcionada a uma parte diferente do braço robótico. As feixes podem ser ligadas ou desligadas e ajustadas em intensidade, permitindo que o braço se dobre ou se contraia a qualquer momento, bem como os tentáculos de um polvo. Essa técnica pode, em princípio, criar um robô com graus de liberdade praticamente infinitos ⎯ muito além das capacidades dos robôs tradicionais com juntas fixas.
“O que há de novo aqui é usar o padrão de luz para alcançar mudanças complexas de forma”, disse Rafael VerduzcoProfessor e Presidente Associado de Engenharia Química e Biomolecular e Professor de Ciência e Nanoengenharia de Materiais. “No trabalho anterior, o próprio materials foi padronizado ou programado para mudar de forma de uma maneira, mas aqui o materials pode mudar de várias maneiras, dependendo do padrão de feixe a laser”.
Para treinar um braço tão multiparâmetro, a equipe executou um pequeno número de combinações de configurações de luz e registrou como o braço do robô se deformou em cada caso, usando os dados para treinar uma rede neural convolucional ⎯ Um tipo de inteligência synthetic usada no reconhecimento de imagem. O modelo foi capaz de produzir o padrão de luz exato necessário para criar uma forma desejada, como flexão ou um movimento de alcance.
O protótipo atual é plano e se transfer em 2D, mas as versões futuras podem se dobrar em três dimensões com sensores e câmeras adicionais.
 Crédito da foto: Jeff Fitlow/Rice College
Crédito da foto: Jeff Fitlow/Rice College
“Este é um passo para ter uma robótica mais segura e mais capaz para várias aplicações que variam de dispositivos biomédicos implantáveis a robôs industriais que lidam com produtos suaves”, disse Blackert.

Universidade de Rice