
Fonte: DALL·E 2 da OpenAI com aviso “uma imagem hiper-realista de um robô lendo notícias em um laptop computer em uma cafeteria”
Bem-vindo à 4ª edição do Robo-Perception, uma atualização quinzenal de notícias sobre robótica! Nesta postagem, temos o prazer de compartilhar uma série de novos avanços na área e destacar o progresso dos robôs em áreas como aplicações móveis, limpeza, mineração subaquática, flexibilidade, bem-estar humano, tratamentos de depressão e interações humanas.
Adaptações simplificadas do comportamento do robô móvel
No mundo das adaptações de sistemas, pesquisadores da Universidade de Tecnologia de Eindhoven introduziram uma metodologia que preenche a lacuna entre desenvolvedores de aplicativos e engenheiros de controle no contexto da adaptação do comportamento de robôs móveis. Esta abordagem aproveita descrições simbólicas do comportamento dos robôs, conhecidas como “semântica de comportamento”, e as traduz em ações de controle através de um “mapa semântico”. Esta inovação visa simplificar a programação de controle de movimento para aplicações de robôs móveis autônomos e facilitar a integração entre softwares de controle de vários fornecedores. Ao estabelecer uma camada de interação estruturada entre as camadas de aplicação, interação e controle, esta metodologia poderia agilizar a complexidade das aplicações de robôs móveis, potencialmente levando a sistemas de exploração e navegação subterrânea mais eficientes.
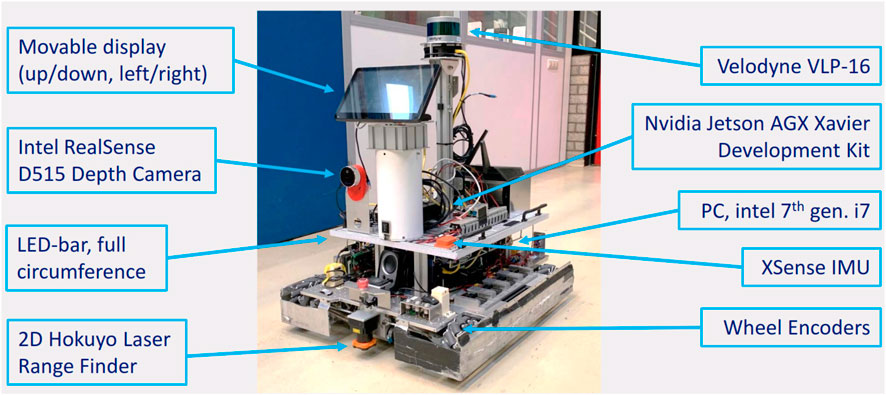
A perspectiva frontal da plataforma móvel (mostra componentes de {hardware} com setas azuis). Fonte.
Novo robô para limpezas domésticas
Falando em robôs úteis, Universidade de Princeton criou um robô chamado TidyBot para enfrentar o desafio da arrumação doméstica. Ao contrário de tarefas simples, como mover objetos, a limpeza do mundo actual exige que um robô diferencie os objetos, coloque-os corretamente e evite danificá-los. O TidyBot consegue isso por meio de uma combinação de destreza física, reconhecimento visible e compreensão da linguagem. Equipado com um braço robótico móvel, um modelo de visão e um modelo de linguagem, o TidyBot pode identificar objetos, colocá-los em locais designados e até inferir ações adequadas com uma taxa de precisão de 85%. O sucesso do TidyBot demonstra o seu potencial para lidar com tarefas domésticas complexas.
TidyBot em funcionamento. Fonte.
Robôs de mineração em alto mar
Mudando nosso foco para ambientes subaquáticos, pesquisadores estão abordando os obstáculos de eficiência enfrentados na mineração em alto mar por meio de planejamento inovador de caminhos para veículos robóticos autônomos de mineração. Com nódulos de manganês de águas profundas com potencial significativo, esses veículos robóticos são essenciais para sua coleta. Ao refinar os métodos de planejamento de trajetória, os pesquisadores pretendem melhorar a eficiência desses veículos na travessia de terrenos subaquáticos desafiadores, evitando obstáculos. Este desenvolvimento poderia levar a uma extração mais eficaz e responsável de recursos do fundo do oceano, contribuindo para a utilização sustentável de recursos minerais valiosos.
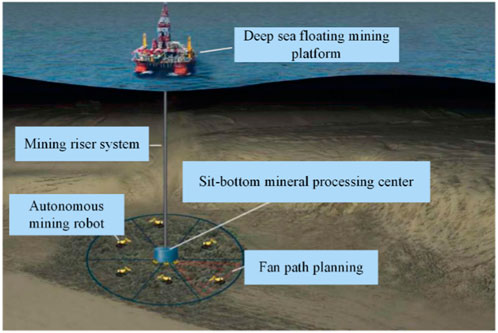
Diagrama que descreve a estrutura operacional do sistema de mineração em alto mar. Fonte.
Robôs suaves avançados com destreza e flexibilidade
No que diz respeito ao campo do movimento robótico, recentemente pesquisadores da Universidade Jiao Tong de Xangai desenvolveram robôs leves de pequena escala com notável destreza, permitindo mudanças imediatas e reversíveis na direção do movimento e reconfiguração da forma. Esses robôs, alimentados por um músculo synthetic de elastômero dielétrico ativo e um design exclusivo de pé em rede quiral, podem mudar de direção durante movimentos rápidos com uma única entrada de tensão. O pé de rede quiral gera vários comportamentos de locomoção, incluindo movimento para frente, para trás e round, ajustando as frequências de tensão. Além disso, a combinação deste projeto estrutural com materiais com memória de forma permite que os robôs executem tarefas complexas, como navegar em túneis estreitos ou formar trajetórias específicas. Esta inovação abre as portas para robôs macios autônomos de próxima geração, capazes de locomoção versátil.
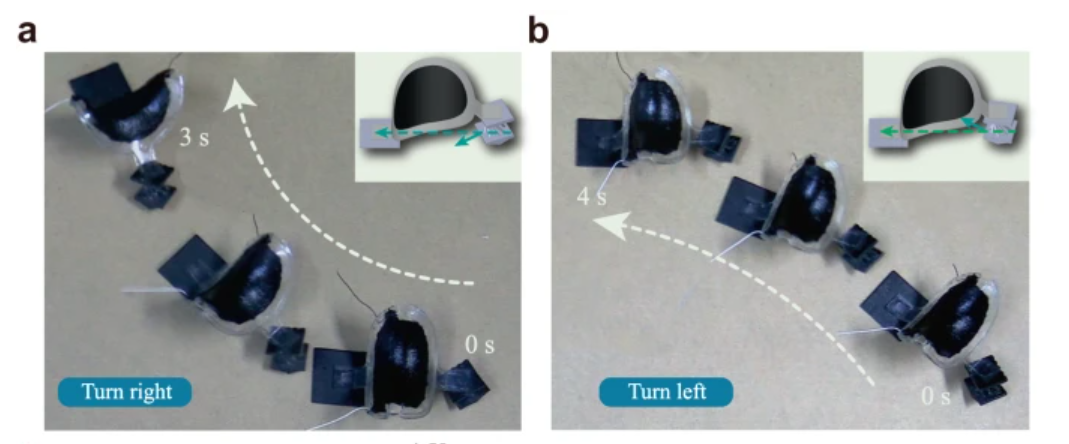
O robô macio realiza movimentos circulares nas direções direita ou esquerda, posicionando o pé da treliça em direção aos respectivos lados. Fonte.
Cães robóticos utilizados para confortar pacientes
Voltando nosso foco para o uso de robôs na área de saúde, Alunos de Stanfordjuntamente com pesquisadores e médicos, fizeram parceria com líderes da indústria de IA e robótica para apresentar novos cães robóticos projetados para interagir com pacientes pediátricos no Hospital Infantil Lucile Packard. Os pacientes do hospital tiveram a oportunidade de interagir com os robôs lúdicos, demonstrando os benefícios potenciais destes animais de estimação mecânicos para o bem-estar das crianças durante a internação hospitalar. Os robôs, chamados Pupper, foram desenvolvidos por estudantes de graduação em engenharia e operados por meio de controladores portáteis. O objetivo da demonstração foi estudar a interação entre os robôs e os pacientes pediátricos, explorando formas de melhorar a experiência clínica e reduzir a ansiedade.

Um paciente brincando com o cão robótico. Fonte.
Inovações robóticas podem ajudar no tratamento da depressão
Na mesma linha da melhoria do bem-estar, um estudo piloto recente explorou os benefícios potenciais do uso da robótica na estimulação magnética transcraniana (EMT) para o tratamento da depressão. Pesquisadores liderados por Hyunsoo Shin desenvolveu um robô TMS personalizado projetado para melhorar a precisão da colocação da bobina TMS no cérebro, um aspecto crítico do tratamento eficaz. Ao empregar o sistema robótico, reduziram o tempo de preparação em 53% e minimizaram significativamente os erros no posicionamento da bobina. O estudo encontrou efeitos terapêuticos comparáveis na gravidade da depressão e no fluxo sanguíneo cerebral regional (rCBF) entre os métodos robótico e guide de EMT, lançando luz sobre o potencial da assistência robótica no aumento da precisão e eficiência dos tratamentos de EMT.
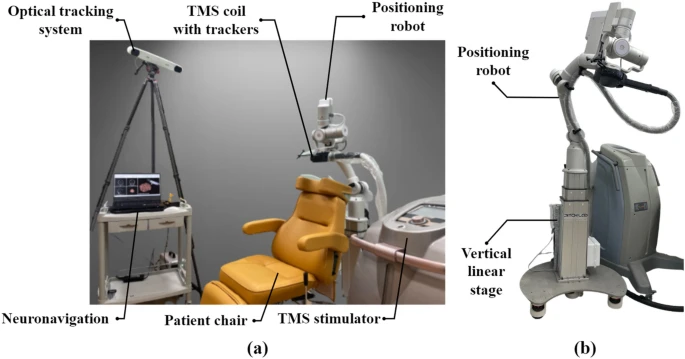
Configuração da estimulação magnética transcraniana repetitiva robótica (EMTr) dentro da instalação de tratamento e dispositivo de posicionamento robótico para colocação automatizada de bobinas. Fonte.
Pesquisa avançada de olhos robóticos
Finalmente, no mundo do aprimoramento humano-robô, um estudo conduzido por pesquisadores de diversas instituições explorou o potencial do uso de olhos robóticos como dicas preditivas na interação humano-robô (HRI). O estudo teve como objetivo compreender se e como o design dos olhos robóticos preditivos poderia melhorar as interações entre humanos e robôs. Quatro tipos diferentes de designs de olhos foram testados, incluindo flechas, olhos humanos e dois designs de olhos de robôs antropomórficos. Os resultados indicaram que os olhos robóticos antropomórficos abstratos, que imitam certos aspectos da atenção humana, foram mais eficazes em direcionar a atenção dos participantes e desencadear mudanças reflexivas. Essas descobertas sugerem que a incorporação de olhos antropomórficos abstratos no design do robô poderia melhorar a previsibilidade dos movimentos do robô e melhorar o HRI.
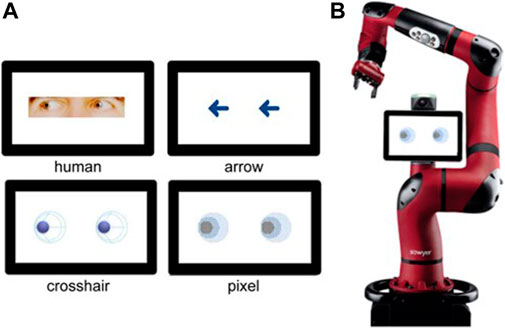
Os quatro tipos de estímulos. A primeira linha mostra os estímulos humano (esquerda) e seta (direita). A segunda linha exibe os olhos abstratos do robô antropomórfico. Fotografia do sujeito do questionário, o robô cooperativo Sawyer. Fonte.
O fluxo contínuo de progresso observado em diversos domínios sublinha a natureza adaptável e em constante progresso da tecnologia robótica, revelando novos caminhos para a sua incorporação num espectro de indústrias. O avanço gradual no domínio da robótica reflecte esforços persistentes e sugere as implicações potenciais que estes avanços podem trazer para o futuro.
Fontes:
- Chen, HL, Hendrikx, B., Torta, E., Bruyninckx, H., & van de Molengraft, R. (2023, 10 de julho). Adaptação de comportamento para robôs móveis através de composições de mapas semânticos de controladores baseados em restrições. Fronteiras.
- Princeton Engineering – Engenheiros limpam com TidyBot. (nd). Engenharia de Princeton. Recuperado em 30 de agosto de 2023,
- Xie, Y., Liu, C., Chen, X., Liu, G., Leng, D., Pan, W., & Shao, S. (2023, 12 de julho). Pesquisa sobre planejamento de trajetória de veículo autônomo de mineração de nódulos de manganês baseado em sistema de mineração elevatória. Fronteiras.
- Wang, D., Zhao, B., Li, X., Dong, L., Zhang, M., Zou, J., & Gu, G. (2023). Robôs macios hábeis, acionados eletricamente, com design reconfigurável de pés em rede quiral. Comunicações da Natureza, 14(1), 5067.
- Universidade, S. (2023, 1º de agosto). Cães-robôs liberam alegria no hospital de Stanford. Relatório Stanford.
- Shin, H., Jeong, H., Ryu, W., Lee, G., Lee, J., Kim, D., Music, I.-U., Chung, Y.-A., & Lee, S. (2023). Estimulação magnética transcraniana robótica no tratamento da depressão: um estudo piloto. Relatórios Científicos, 13(1), 14074.
- Onnasch, L., Schweidler, P., & Schmidt, H. (2023, 3 de julho). O potencial dos olhos dos robôs como pistas preditivas em HRI – um estudo de rastreamento ocular. Fronteiras.

Shaunak Kapur
faz parte da equipe de voluntariado do Robohub e está prestes a terminar o ensino médio (Texas). Shaun foi cativado pela robótica desde muito jovem.
Shaunak Kapur faz parte da equipe de voluntariado do Robohub e está prestes a terminar o ensino médio (Texas). Shaun foi cativado pela robótica desde muito jovem.