Todos os quadrúpedes que cobrimos têm corpos rígidos de uma peça, o que parece ser um bom grito para a maioria das travessuras que eles fazem. Mas uma coluna flexível pode ser melhor em certas situações de escalada, e é aí que o Kleiyn Robodog pode brilhar.
Como vimos de nomes como AnymalAssim, Lince e GO2robôs quadrus com costas rígidas não são apenas úteis para transportar equipamentos, mas também ágeis. Mas ter um pouco de flexão também pode ser útil, se eles precisarem se espremer em espaços apertados, como subir o inside de uma chaminé, por exemplo.
Cientistas da mesma Universidade de Tóquio que nos trouxeram um robô musculoesquelético anatomicamente corretoa dragão voador e a motorista humanóide Introduziu um Robodog com um articulado de volta para enfrentar exatamente essa tarefa, além de atacar terrenos variados de altura-como você pode encontrar em websites de desastres-com facilidade.

JSK
Essa articulação da cintura significa que as costas podem ser arqueadas levemente para reduzir o comprimento do corpo do robô ou flexionar para navegar por ambientes complexos. Em vez de montar garras ou garras até as pontas dos pés para ajudar as superfícies verticais desiguais de Kleiyn e desafiam a gravidade, a equipe JSK optou por fazer com que as articulações das pernas exerçam pressão suficiente contra as paredes lisas opostas para manter o robô no alto.
Cada perna tem três graus de liberdade, além de uma junta de eixo de campo no “ombro” e no joelho traseiro “. Todas as articulações das pernas Atuadores esportivos com uma taxa de redução de 1:10 e torque de 25 nm (18,4 lb.ft). Onde os dois hyperlinks de “bezerro” de robodogs como o Go2 e o Lynx enfrentam da mesma maneira, o bot JSK os faz de frente para direções opostas para um melhor contato vertical nas almofadas sem afetar sua marcha a pé.
A articulação da cintura tem um grau de liberdade e engrenagem da taxa de redução de 1: 9 no motor de 40 nm (29,5 lb.ft). Está preso a caixas de corpo idênticas envolvidas em alumínio que abriga componentes como a bateria e o computador a bordo-um na frente que é encimado por uma unidade Lidar com IMU embutido e outro na parte de trás.
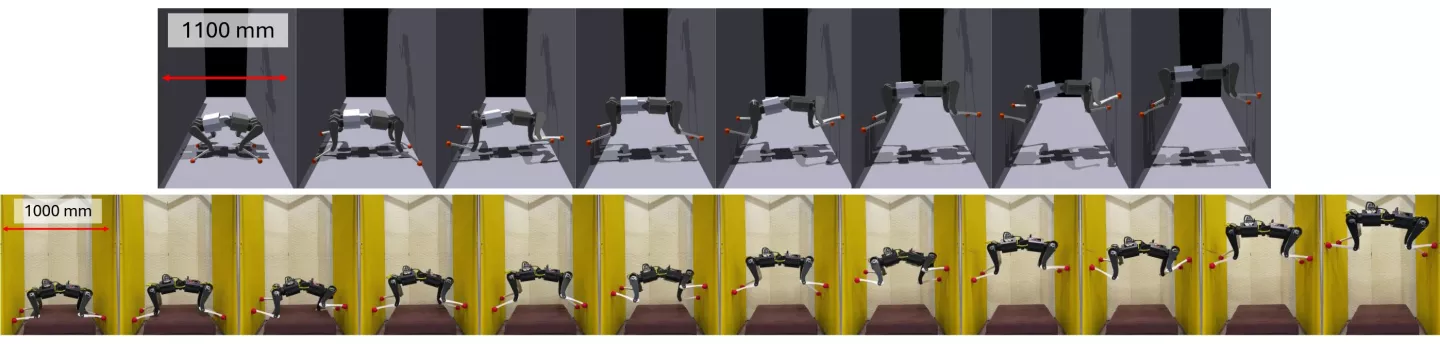
Os pesquisadores empregaram uma nova plataforma de aprendizado de reforço chamada Curriculum Studying, guiada por contato, para oferecer ao quadrúcego a experiência digital necessária para dominar suas costeletas de escalada de chaminés de uma posição em pé. Após o treinamento em espaços virtuais, a equipe ergueu duas placas para formar três conjuntos de paredes, cada um com uma largura de lacuna diferente entre eles – 800, 900 e 1.000 mm.
JSK
O quadrúpede foi então enviado um comando para subir. No caso da lacuna de 800 mm, o robô conseguiu velocidades de escalada de até 170 mm por segundo, o que a equipe diz ser 50x mais rápido que Romela Silvia Hexapod, da UCLA, Silvia – que é relatado para subir a 3 mm/s. A equipe também testou locomoção common, enfrentando escadas e caminhando por superfícies irregulares.
O Kleiyn Robodog pesa em 13 kg (28,6 lb), tem 400 mm (15,7 polegadas) de altura e tem um comprimento corporal reto de 760 mm (~ 30 pol.). As aplicações práticas para inspeções industriais são bastante óbvias, mas as operações de pesquisa e salvamento também podem se beneficiar desse design versátil e plataforma de aprendizado digital.
Um artigo sobre o projeto está disponível em arxiv. O vídeo abaixo tem mais.
Kleiyn: um robô quadrúpede com uma cintura ativa para escalada de parede (Iros 2025)
Fonte: JSK