
Se você já fez caminhadas, sabe que as trilhas podem ser desafiadoras e imprevisíveis. Um caminho que estava livre na semana passada pode estar bloqueado hoje por uma árvore caída. A má manutenção, raízes expostas, pedras soltas e terreno irregular complicam ainda mais o terreno, tornando as trilhas difíceis para um robô navegar de forma autônoma. Depois de uma tempestade, podem formar-se poças, a lama pode deslocar-se e a erosão pode remodelar a paisagem. Este foi o desafio basic do nosso trabalho: como um robô pode perceber, planejar e se adaptar em tempo actual para navegar com segurança pelas trilhas?
A navegação autônoma por trilhas não é apenas um problema divertido de robótica; tem potencial para impacto no mundo actual. Só nos Estados Unidos, existem mais de 193.500 milhas de trilhas em terras federais, com muitas mais administradas por agências estaduais e locais. Milhões de pessoas percorrem essas trilhas todos os anos.
Robôs capazes de navegar por trilhas podem ajudar com:
- Monitoramento e manutenção de trilhas
- Coleta de dados ambientais
- Operações de busca e salvamento
- Auxiliar a equipe do parque em áreas remotas ou perigosas
Dirigir fora da trilha introduz ainda mais incerteza. Do ponto de vista ambiental, abandonar a trilha pode danificar a vegetação, acelerar a erosão e perturbar a vida selvagem. Ainda assim, há momentos em que permanecer estritamente na trilha é inseguro ou impossível. Portanto, nossa questão passou a ser: como um robô pode ir de A a B permanecendo na trilha quando possível e saindo dela de forma inteligente quando necessário por segurança?
Vendo o mundo de duas maneiras: geometria + semântica
Nossa principal contribuição é lidar com a incerteza combinando duas formas complementares de compreender e mapear o ambiente:
- Análise geométrica de terreno usando LiDAR, que nos informa sobre declives, mudanças de altura e grandes obstáculos.
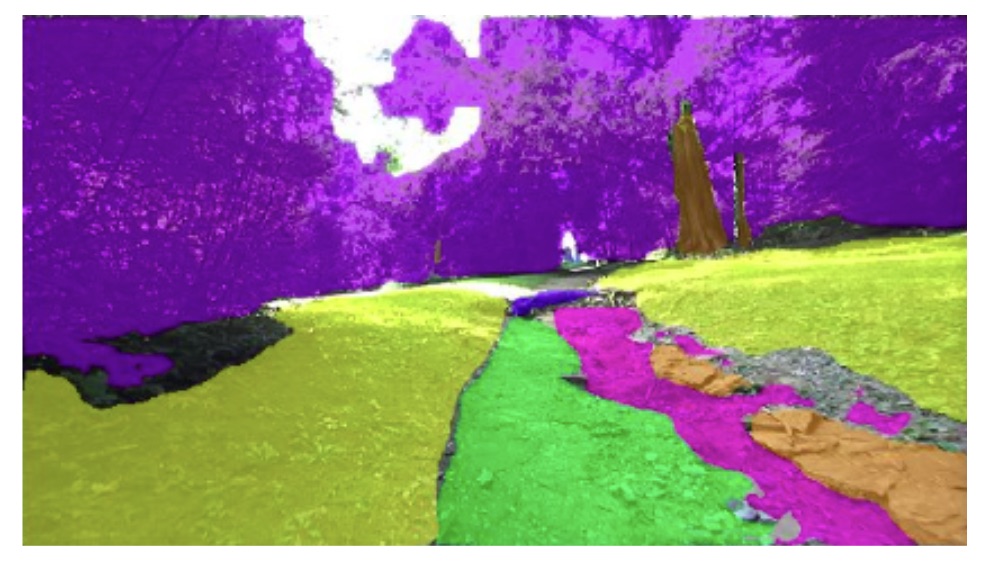
- Detecção de terreno com base semântica, usando imagens da câmera do robô, que nos diz o que o robô está olhando: trilha, grama, pedras, troncos de árvores, raízes, buracos e assim por diante.
A geometria é ótima para detectar grandes perigos, mas enfrenta pequenos obstáculos e terrenos que parecem geometricamente semelhantes, como areia versus solo firme, ou poças rasas versus solo seco, que são perigosos o suficiente para deixar um robô preso ou danificado. A percepção semântica pode distinguir visualmente esses casos, especialmente a trilha que o robô deve seguir. No entanto, os sistemas baseados em câmeras são sensíveis à iluminação e à visibilidade, o que os torna pouco confiáveis por si só. Ao fundir geometria e semântica, obtemos uma representação muito mais robusta do que é seguro para dirigir.
Construímos um conjunto de dados de trilhas para caminhadas, rotulando imagens em oito courses de terreno, e treinamos um modelo de segmentação semântica. Notavelmente, o modelo tornou-se muito bom no reconhecimento de trilhas estabelecidas. Esses rótulos semânticos foram projetados em 3D usando profundidade e combinados com o mapa de análise geométrica de terreno baseado em LiDAR. Usando uma estrutura de árvore twin kd, fundimos tudo em um único mapa de atravessabilidadeonde cada ponto do espaço tem um custo que representa o quão seguro é percorrer, priorizando o terreno da trilha.
A próxima etapa é decidir para onde o robô deve ir em seguida, o que abordaremos usando uma abordagem de planejamento hierárquico. No nível world, em vez de planejar um caminho completo em uma única passagem, o planejador opera em um horizonte recuado, replanejando continuamente à medida que o robô se transfer pelo ambiente. Desenvolvemos um RRT* customizado que direciona sua busca para áreas com maior probabilidade de atravessabilidade e usa os valores de atravessabilidade como sua função de custo. Isso o torna eficaz na geração de waypoints intermediários. Um planejador native então lida com o movimento entre pontos de referência usando trajetórias de arco pré-computadas e prevenção de colisões a partir dos mapas de capacidade de travessia e análise de terreno.
Na prática, isso faz com que o robô prefira ficar na trilha, mas não teimoso. Se a trilha à frente estiver bloqueada por um perigo, como uma pedra grande ou uma queda acentuada, ele poderá passar temporariamente pela grama ou outra área segura ao redor da trilha e depois retornar quando as condições melhorarem. Este comportamento acaba por ser essential para trilhos reais, onde os obstáculos são comuns e raramente marcados com antecedência.
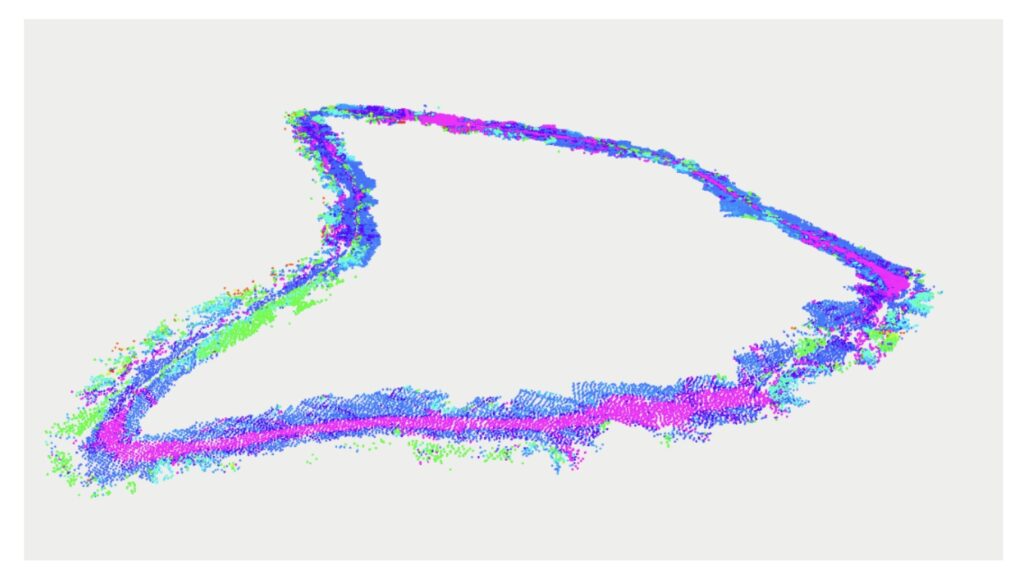
Testamos nosso sistema no West Virginia College Core Arboretum usando um robô Clearpath Husky. O vídeo abaixo resume nossa abordagem, mostrando o robô navegando pela trilha junto com o mapa geométrico de atravessabilidade, o mapa semântico e a representação combinada que, em última análise, orienta as decisões de planejamento.
No geral, este trabalho mostra que os robôs não precisam de estradas perfeitamente pavimentadas para navegar com eficácia. Com a combinação certa de percepção e planejamento, eles podem lidar com trilhas sinuosas, confusas e não estruturadas.
O que vem a seguir?
Ainda há muito espaço para melhorias. Expandir o conjunto de dados para incluir diferentes estações e tipos de trilhas aumentaria a robustez. Um melhor manejo de condições climáticas e de iluminação extremas é outro passo importante. Do lado do planejamento, vemos oportunidades para otimizar ainda mais a forma como o robô equilibra a aderência à trilha e a eficiência.
Se você estiver interessado em saber mais, confira nosso artigo “Navegação autônoma em trilhas de caminhada por meio de segmentação semântica e análise geométrica”. Também tornamos nosso conjunto de dados e código de código aberto. E se você é um estudante de graduação interessado em contribuir, fique atento às oportunidades de verão do REU na West Virginia College, estamos sempre entusiasmados em receber novas pessoas na robótica.
etiquetas: IROS

Christopher Tatsch – PhD em Robótica, West Virginia College.