
Os versos descrevem robótica multi-agente usando inferência ativa hierárquica. Fonte: Versos AI
Parte do desafio de combinar inteligência synthetic com robôs é a quantidade de dados de treinamento necessários. Os Versos AI Inc. disseram ontem que sua arquitetura de robótica pode realizar tarefas domésticas típicas melhor do que outros modelos de robótica e sem nenhum pré-treinamento.
“Acredito que, ao combinar nossa modelagem mundial e nossos recursos ativos de inferência, mostramos que os robôs podem pensar nos pés deles – navegar e concluir tarefas complexas sem meses de treinamento dispendioso”. declarou Hari Thiruvengada, diretor de tecnologia dos versos. “Nosso avanço tem o potencial de transformar como os robôs operam entre as indústrias, de fábricas e armazéns a casas e espaços públicos, potencialmente desbloqueando uma nova period de automação verdadeiramente adaptativa e confiável”.
Fundada em 2020 como Versses Applied sciences Inc., os versos disseram que é “uma empresa de computação cognitiva Constructing próxima geração Sistemas de software program Agentic ”inspirados pela natureza. A empresa de Vancouver, British Columbia, afirmou que projetou seu Gênio Produto principal em torno dos primeiros princípios encontrados em ciência, física e biologia. O plataforma pode gerar previsões e decisões específicas de domínio confiáveis sob incerteza, de acordo com os versos.
Em seu segundo trimestre 2025 arquivamento Nesta semana, com a Comissão de Valores Mobiliários dos EUA, os versos reportaram receita líquida de US $ 115.939, uma perda abrangente líquida de US $ 9,4 milhões e US $ 3,2 milhões em dinheiro.
Nota do editor: Robobusiness 2025, que será em 15 e 16 de outubro em Santa Clara, Califórnia, incluirá o fórum físico da IA, entre outras faixas. Registre -se agora para participar!

Versos constrói IA para adaptabilidade
Os versos descreveram os robôs como caindo em duas categorias: drive-by-wire, na qual tudo é pré-programado e aprendizado profundo, que requer grandes quantidades de dados para treinamento.
“Os robôs costumam ter um bom desempenho em tarefas com roteiro, mas podem congelar quando confrontadas com novas situações; mesmo algo tão simples como uma caixa no lugar errado pode interromper o progresso”, observou a empresa, que citou veículos guiados autônomos (AGVS) como exemplos de sistemas drive-by-wire.
Como as fábricas, armazéns e casas estão sempre mudando, os robôs geralmente lutam para se adaptar, trabalhando mais lentamente ou até parando, disse o documento. Para superar suas limitações inerentes, os ambientes de robótica são frequentemente controlados. Por exemplo, os robôs podem ser colocados em uma gaiola ou em áreas Onde nenhum homem é permitido. Essa prática reduz bastante a utilidade dos robôs, disseram versos.
Embora as abordagens de aprendizado profundo sejam mais flexíveis, elas exigem muitos dados e ainda podem lutar com mudanças, como uma garrafa que cai ou uma cadeira está fora de lugar, de acordo com a empresa.
“Quando um humano precisa tomar uma bebida em um apartamento novo, não é executado por ter praticado essa tarefa em centenas de apartamentos diferentes; eles são capazes de se adaptar porque têm um modelo de como o mundo funciona”, disse Verses. “Isso permite que os humanos descubram que precisam abrir a geladeira e pegar uma garrafa”.
A empresa afirmou que seu sistema não requer nenhum pré-treinamento e, em vez disso, apenas se adapta ao explorar o ambiente. Eles consistem em módulos de visão, planejamento e controle, permitindo que os robôs lidem com obstáculos inesperados ou a captar itens caídos.
Novos modelos enfrentam tarefas domésticas
Os membros do Laboratório de Pesquisa dos Versos publicaram um papel Intitulado “Manipulação móvel com inferência ativa por tarefas de rearranjo de longo horizonte”. Eles compararam o modelo de robótica versículos é com uma alternativa de aprendizado profundo em três tarefas: arrumar uma sala, preparar mantimentos e definir uma mesa.
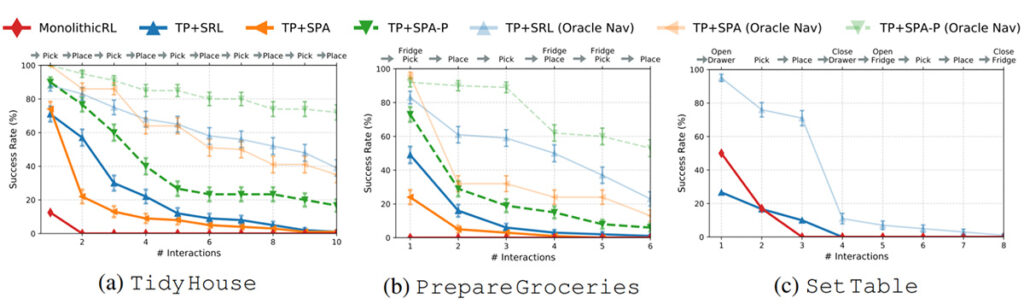
Versos diz que seu modelo teve um bom desempenho contra a linha de base nas tarefas domésticas básicas. (Clique aqui para ampliar.) Fonte: versículos ai
O modelo de robótica do Verso alcançou uma taxa de sucesso de 66,5% nessas tarefas, enquanto a melhor alternativa anterior teve uma taxa de sucesso de 54,7%. A empresa reivindicado que seu modelo não exigia treinamento, enquanto o modelo “manipulação móvel de várias habilidades” exigiu 1,3 bilhão de etapas para pré-treinar várias habilidades nos três tarefas.
O modelo de versos tinha conhecimento básico, como a pose de repouso de seu próprio braço, quando ocioso ou quanta resistência o braço iria obter de obstáculos. Por outro lado, o modelo de linha de base exigiu treinamento offline de 6.400 episódios por tarefa e 100 milhões de etapas por habilidade em um whole de sete habilidades, como pegar um objeto ou abrir uma geladeira.
“Atualmente, os sistemas de robótica geralmente são quebradiços e precisam de grandes quantidades de dados de treinamento, o que os torna caros e propensos a dar errado”. disse Sean Wallingford, ex -presidente e CEO da Swissloguma empresa líder de automação de logística. “Por exemplo, se você levar um robô para uma nova fábrica ou pedir para fazer um trabalho diferente, ele precisará de muito treinamento e pode não ser confiável.”
“Os versos avanços são emocionantes, porque oferecem uma abordagem alternativa”, acrescentou. “Se pudermos implantar robôs sem treinamento, eles serão viáveis em uma ampla gama de atividades, desde fábricas e armazéns a aplicações domésticas e comerciais”.