Há apenas dois anos, uma pequena arraia robótica se tornou o robô de corpo mole que nada mais rápido do mundo. Bem, um de seus descendentes quebrou esse recorde – e usa menos energia do que seu antecessor, para começar.
O comprimento de 22,8 mm robô authentic foi projetado por Assoc. Prof. Jie Yin e colegas da Universidade Estadual da Carolina do Norte.
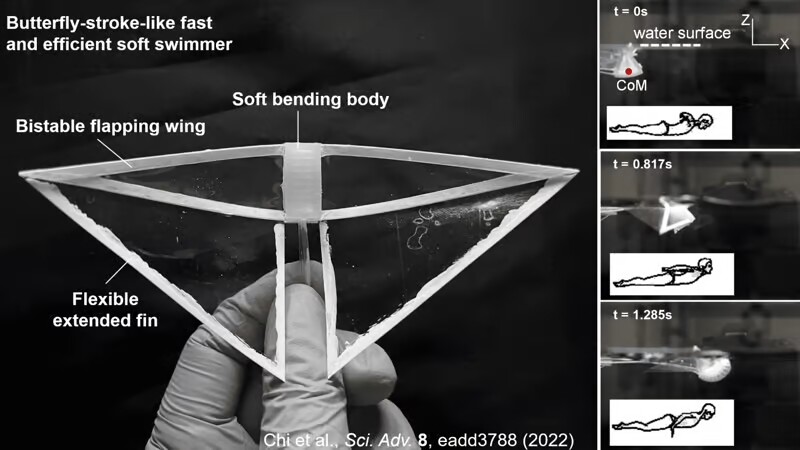
Ele apresentava duas asas flexíveis semelhantes a arraias de poliéster, que eram na verdade as extremidades esquerda e direita de uma única estrutura biestável curva. Biestabilidade refere-se à capacidade de uma estrutura tensionada permanecer em qualquer uma das duas posições sem exigir qualquer energia para fazê-lo – um grampo de cabelo é um bom exemplo de estrutura biestável.
Universidade Estadual da Carolina do Norte
O meio da estrutura da asa biestável do robô foi imprensado entre atuadores pneumáticos de silicone macio superior e inferior.
Quando o ar foi bombeado para o atuador superior, ele se curvou para cima e puxou para cima no meio da estrutura da asa, fazendo com que ela “encaixasse” em uma posição que puxava as duas asas para baixo. Quando o atuador superior foi esvaziado e o fundo um deles foi inflado, a estrutura quebrou na direção oposta, trazendo as asas de volta para cima. O mecanismo é demonstrado no vídeo a seguir.
Um nadador robótico macio semelhante a uma braçada de borboleta, rápido e eficiente
Ao ativar os dois atuadores desta maneira (através de uma bomba de ar externa), foi possível bater as asas com rapidez suficiente para uma velocidade média de natação de 3,74 comprimentos corporais por segundo. Segundo os cientistas, isso foi cerca de quatro vezes mais rápido do que anteriormente period possível para robôs nadadores de corpo mole.
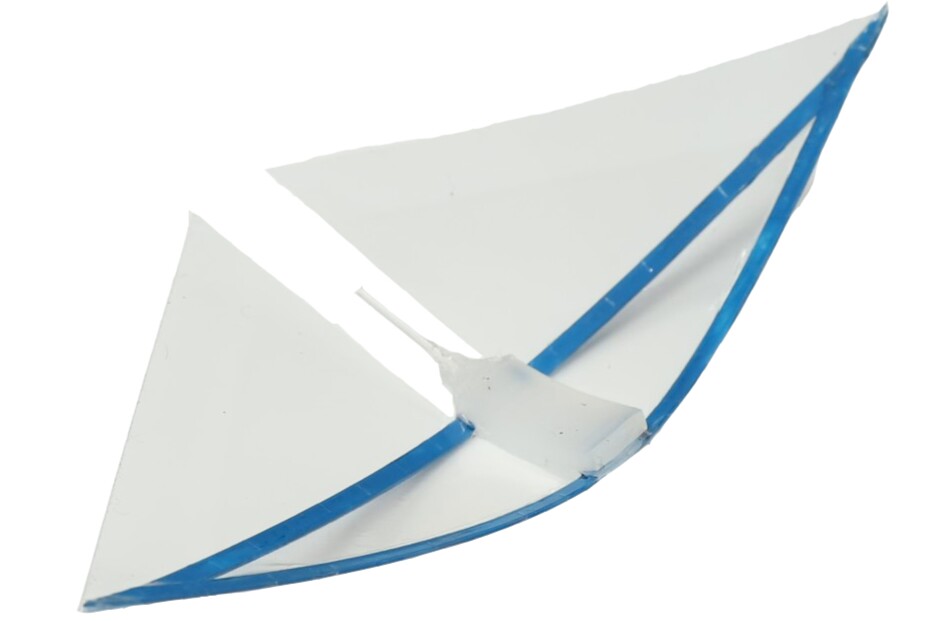
No comprimento de 68 mm novo robo-manta, Yin e sua equipe eliminaram o design biestável junto com o atuador inferior. A estrutura flexível da asa é agora monoestável, o que significa que irá sempre reverter para apenas uma posição – curvada para baixo no meio com as asas para cima – quando nenhuma energia é aplicada.
Haitao Qing, Universidade Estadual da Carolina do Norte
Ao ser inflado, o atuador pneumático superior único se curva para baixo e puxa para baixo no meio da estrutura da asa, fazendo com que as asas se encaixem para baixo. Assim que o atuador pode esvaziar, entretanto, a força de restauração elástica da estrutura faz com que ele retorne à sua posição padrão, puxando as asas para cima no processo.
Assim, enquanto o robô authentic precisava de tempo e energia para inflar/esvaziar alternadamente dois atuadores por ciclo de movimento de asas para cima e para baixo, o novo bot só precisa ativar um. Essa melhoria dá ao robô uma velocidade média de natação de impressionantes 6,8 comprimentos de corpo por segundo, enquanto consome 1,6 vezes menos energia do que o authentic.
Haitao Qing, Universidade Estadual da Carolina do Norte
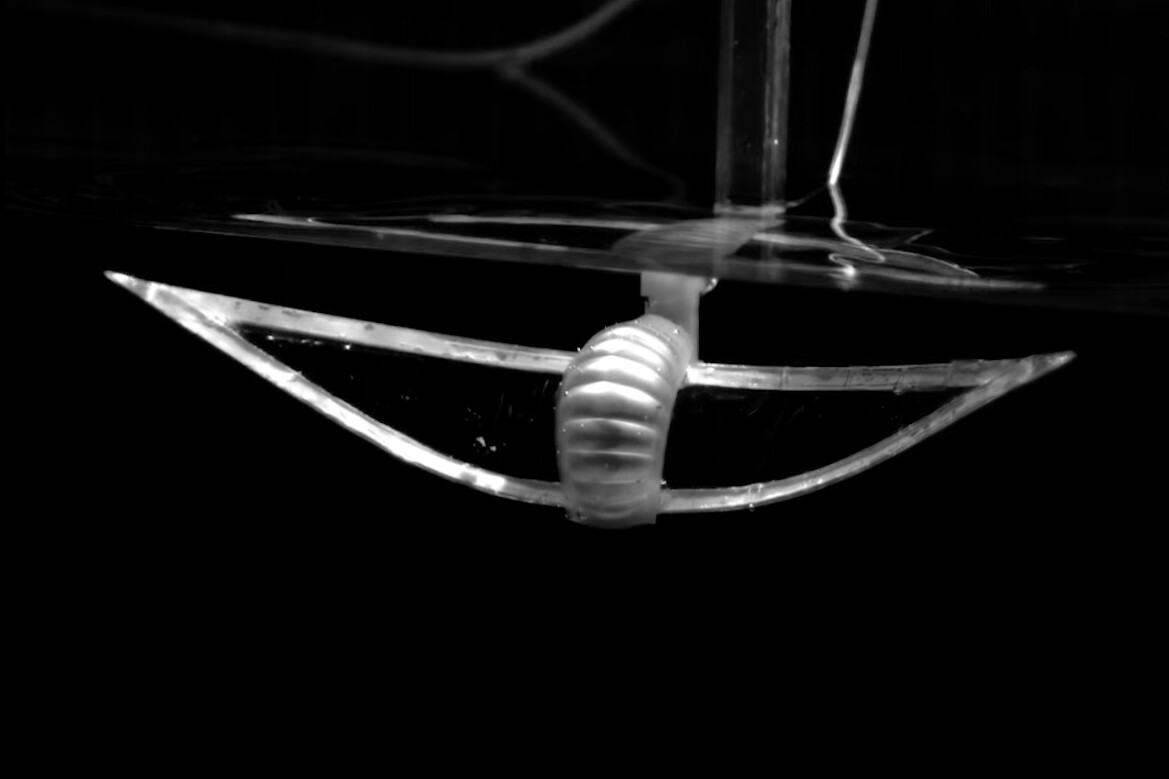
Além disso, o novo design permite que o bot se mova verticalmente dentro da coluna d’água simplesmente variando sua velocidade de natação.
“Quando as nadadeiras do robô estão em repouso, a câmara de ar fica vazia, reduzindo a flutuabilidade do robô. E quando o robô bate as nadadeiras lentamente, as nadadeiras ficam em repouso com mais frequência”, diz o estudante de doutorado Haitao Qing, primeiro autor do estudo. . “Em outras palavras, quanto mais rápido o robô bate as nadadeiras, mais tempo a câmara de ar fica cheia, tornando-a mais flutuante.”
Os cientistas estão agora a trabalhar num método para guiar lateralmente o robô, visando aplicações futuras, como a exploração oceânica e a observação da vida selvagem aquática. Você pode ver a ação nele, no vídeo abaixo.
Um artigo sobre o estudo foi publicado recentemente na revista Avanços da Ciência.
Robôs nadadores macios, rápidos e manobráveis, inspirados na arraia Manta