
A Ardedrone projetou seu sistema de trombectomia mecânica Sasha para usar ímãs e robóticos para ajudar o cateter a recuperar o coágulo sanguíneo de um paciente com AVC. | Fonte: artedrone
A expansão dos cuidados para as vítimas de AVC é uma das maiores oportunidades da Medtech, e a startup Artedrone está desenvolvendo um sistema de microbot que pode navegar para coágulos sanguíneos para trombectomias mecânicas autônomas.
Apoiado por Truffle Capital, Ardedrone tem descobertas enviadas A partir de seu programa pré-clínico de publicação em um diário de pesquisa sem nome, pois continua testando para bloquear o design do sistema Sasha para seu primeiro procedimento em humano em 2027.
O Paris baseado em Paris comece está tentando arrecadar uma rodada de financiamento da Série B de 20 milhões (US $ 22,5 milhões) para finalizar esse trabalho pré-clínico e financiar os primeiros estudos em humanos, com uma rodada da Série C seguindo para financiar um estudo basic até 2028.
“Uma idéia por trás da empresa é democratizar esses procedimentos muito complexos”, disse à CEO da Artedrone Liane Teplitsky, ex -chefe de robótica world da Zimmer Biomet, disse Design médico e terceirização.
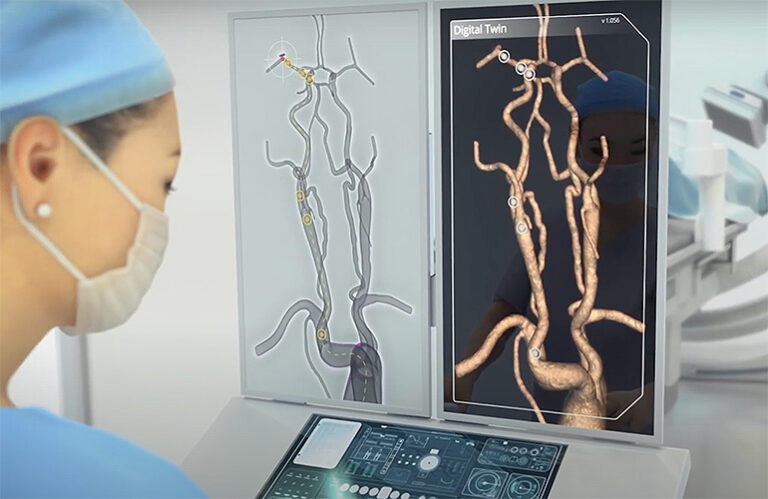
Antes do procedimento, a tomografia computadorizada ou ressonância magnética construiria um gêmeo digital da vasculatura do paciente para mapear um caminho para o coágulo sanguíneo. | Fonte: artedrone
O sistema Sasha cria gêmeo digital médico
O sistema SASHA foi projetado para usar a ressonância magnética ou a imagem CT – as mesmas varreduras que podem localizar e confirmar um coágulo sanguíneo em uma vítima de derrame – para criar um gêmeo digital da vasculatura cerebral para traçar um caminho para o cateter alcançar e remover o coágulo.
Em um laboratório de Cath ou no Laboratório de Neurorradiologia Intervencionista, um intervencionista inseria o cateter na virilha do paciente e até sua artéria carótida.
“Esse é o acampamento base”, disse Teplitsky. “Depois disso, você aperta um botão e o robô é deixado escapar. É impulsionado pelo fluxo sanguíneo – ele não é ativo dessa maneira – até que haja uma bifurcação, como um garfo na estrada.”
“Já é pré-planejado, sabemos exatamente para onde queremos ir, e é aí que entra nosso ímã externo”, acrescentou. “Ele empurra ou puxa o ímã (no cateter) na direção certa, e então continua ao longo desse caminho, pois soltamos um pouco mais de linha automaticamente para o próximo native. Se houver outra bifurcação, usamos o ímã novamente.”

Ímãs no braço robótico e cateter do sistema Sasha ajudam o dispositivo de trombectomia a caminho do coágulo sanguíneo. | Fonte: artedrone
Artedrone usa ímãs para abordar coágulos
O sangue diminui quando o cateter se aproxima do coágulo que está bloqueando o vaso, momento em que o ímã posiciona a extremidade distal do cateter para agarrar o coágulo.
“Ele atua como sucção como um cateter de aspiração, mas você vê propriedades muito diferentes do que um cateter de aspiração regular”, disse Teplitsky, que o descreveu como um copo de sucção magnética. “Você liga a sucção e temos um ciclo de suggestions que nos diz se somos realmente seguidos (ao coágulo antes) começamos a recuar”.
A linha é projetada para ser flexível o suficiente para navegar até o coágulo, mas forte o suficiente para agarrar e removê -la, retirando -se de volta ao cateter orientador e fora do paciente pelo operador à mesa.
“Você basicamente aperta um botão e ele o puxa de volta pela vasculatura”, disse ela. “(Como) um cateter de aspiração, sempre há o risco de o coágulo terminando enquanto você recua, mas o resultado last é que temos o cateter de acampamento base o mais próximo que achamos que podemos chegar.”
Teplitsky se recusou a divulgar os materiais do sistema por razões competitivas. Em um comunicado, Ardedrone disse que a xícara de sucção magnética do microrobot “exibe ao mesmo tempo as propriedades magnéticas apropriadas para a atuação magnética e o design apropriado para otimizar a interação com o coágulo”.
“O copo está conectado a uma seção inovadora com propriedades antagonistas, como alta flexibilidade e baixa tensão”, afirmou a empresa. “Esta seção está conectada a uma estrutura multicamada com as propriedades apropriadas para empurrar”.
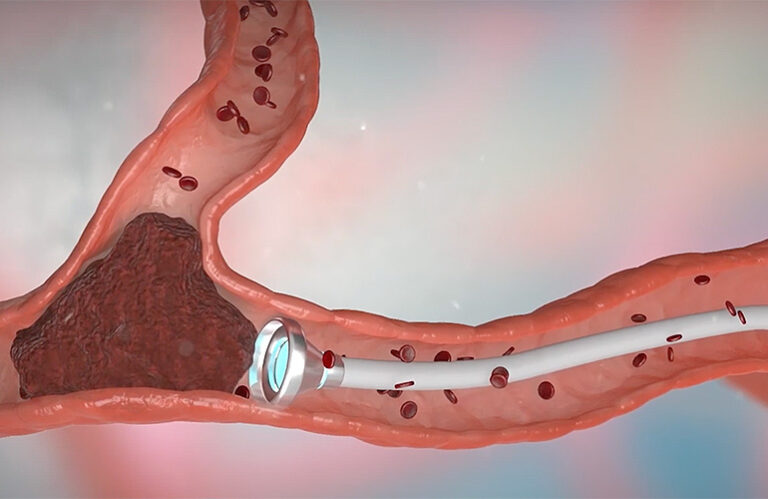
O cateter de trombectomia mecânica no sistema Sasha se transfer com o fluxo de sangue em direção a um coágulo para captura e recuperação usando sucção. | Fonte: artedrone
Desafios pela frente para Artedrone
“Queremos chegar aos centros de AVC de nível II, talvez até centros de atendimento cardíaco, onde você tem mãos especialistas em entrar no carotídeo e, depois disso, eles não precisam chegar a essa vasculatura cerebral, o que leva mais dois a sete anos de treinamento depende de quem você fala e do país”, disse Teplitsky.
“Um dos maiores desafios e oportunidades é que sabemos que o neurorradiologista intervencionista certamente terá que estar envolvido, mas nosso jogo de longo prazo estará nesses centros de AVC de nível II, potencialmente com o cardiologista intervencionista como uma das pistas”, continuou ela. “Então, como descobrimos o melhor caminho a seguir para o nosso primeiro humano-quais centros que queremos ir, com quem queremos fazer parceria e como é isso-e realmente mapeia isso com o risco-benefício para os pacientes?”
O bloqueio no design do sistema, finalizando o desenvolvimento e a documentação da construção de revisão regulatória é “um caminho relativamente direto neste momento”, disse Teplitsky, com a depuração do FDA 510 (okay) a rota mais provável.
Até agora, seu equipamento de teste incluiu modelos 3D de porco e anatomia humana com vasculatura precisa, pressões sanguíneas, viscosidade e temperatura.
“Eu continuo conversando com minha equipe sobre a criação de algum IP em torno deste banco de teste, porque tem sido tão trabalho quanto o produto neste momento”, disse ela. “Aprendemos ótimas lições com isso. Agora temos um modelo in vitro realmente robusto que se traduz no modelo in vivo, para que você possa entrar e se sentir muito confiante à medida que passa de um para o outro”.
Mas existem dois grandes desafios restantes que são comuns para os desenvolvedores da Medtech que trabalham com Robótica.

CEO da Artedrone Liane Teplitsky. | Fonte: artedrone
“Uma é garantir que esteja realmente atendendo a uma necessidade, e sinto que fizemos isso”, disse ela. “Sabemos o que estamos tentando fazer. Há uma enorme necessidade por aí. As pessoas estarão dispostas a pagar por isso, porque há esse enorme fardo e enormes custos associados ao derrame, a terceira líder de incapacidade de longo prazo no mundo. O segundo (desafio) é a facilidade de uso.
A tecnologia pode acabar sendo útil para outros procedimentos neurovasculares ou em aplicações endovasculares ou cardiovasculares.
“Definitivamente, há uma oportunidade quando olhamos para todo o sistema, não apenas o componente do cateter, mas o que estamos fazendo em relação a imagens, IA, entrega de cateter”, disse ela. “Todos esses diferentes componentes poderiam definitivamente ser aplicados a lugares diferentes.”
Nota do editor: Este artigo foi sindicado de O relatório do robô web site de irmãos Design médico e terceirização.