
Fonte: DALL·E 2 da OpenAI com aviso “uma imagem hiper-realista de um robô lendo notícias em um laptop computer em uma cafeteria”
Bem-vindo à 5ª edição do Robo-Perception, uma atualização de notícias sobre robótica! Neste submit, temos o prazer de compartilhar uma série de novos avanços na área e destacar o progresso dos robôs em áreas como interação humano-robô, movimento ágil, métodos de treinamento aprimorados, robótica suave, cirurgia cerebral, navegação médica e pesquisa ecológica.
Novas ferramentas para interação humano-robô
No domínio das interações humano-robô, investigadores de toda a Europa desenvolveram uma nova ferramenta chamada HEUROBOX para avaliar interações. HEUROBOX oferece 84 heurísticas básicas e 228 avançadas para avaliar vários aspectos da interação humano-robô, como segurança, ergonomia, funcionalidade e interfaces. Coloca uma forte ênfase no design centrado no ser humano, abordando a conexão important entre a tecnologia e os fatores humanos. Esta ferramenta visa facilitar a colaboração perfeita entre humanos e robôs em ambientes industriais, garantindo que os robôs se alinhem com as capacidades e necessidades humanas, enfatizando a produtividade e o bem-estar.
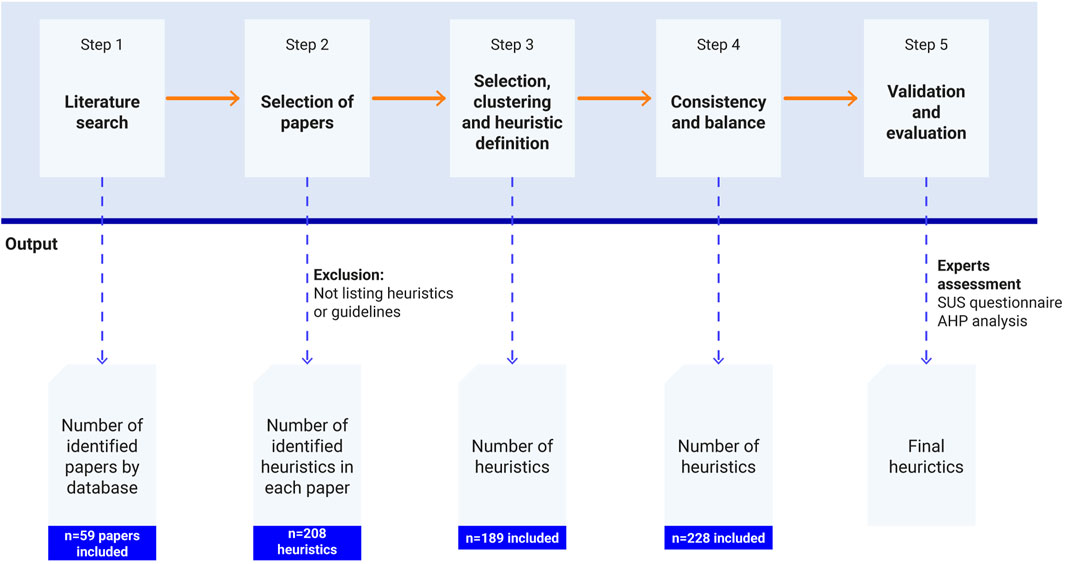
Abordagem para a criação de um novo método para avaliar heurísticas de interação humano-robô (HRI). Fonte.
Inovações para controle aprimorado em robótica ágil
Mudando nosso foco para robôs ágeis, pesquisadores da Universidade de Zhejiang projetaram um robô semelhante a uma cobra acionado por cabo para movimento eficiente em espaços confinados. Este robô utiliza transdutores de força e sensores de ângulo para obter controle preciso de circuito duplo. Ao combinar o suggestions de pose dos sensores de ângulo e o suggestions de força dos transdutores, esta estratégia de controle aumenta a precisão do robô e garante a força e a rigidez do cabo, garantindo estabilidade e confiabilidade durante o movimento. Esta inovação tem um potencial significativo para diversas aplicações, incluindo cirurgia minimamente invasiva, tratamento de resíduos nucleares, inspeções no espaço e operações de busca e salvamento em ambientes complexos. A estratégia de design e controle do robô promete avanços em sistemas robóticos de alta precisão para aplicações de engenharia.
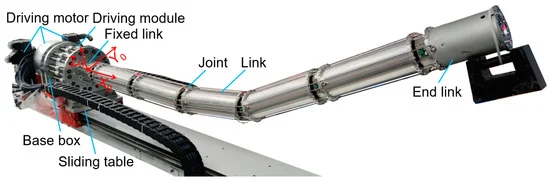
Visão geral da RSE. Fonte.
Melhores métodos de treinamento em robótica ágil
Mantendo-se no campo da robótica ágil, pesquisadores da Universidade de Zurique recentemente ampliaram os limites deste tipo de robôs, concentrando-se no papel elementary dos sistemas de controle dentro deles. Sua investigação colocou duas metodologias principais uma contra a outra: controle ótimo baseado em modelo (OC) e aprendizagem por reforço (RL). Surpreendentemente, a RL, que permite aos robôs aprender através de tentativa e erro, triunfou num exigente teste do mundo actual: corridas autónomas de drones. O RL não só superou as capacidades humanas, como também superou as capacidades humanas, com o drone ágil alcançando um pico de aceleração surpreendente, excedendo 12 vezes a aceleração gravitacional e uma velocidade máxima notável de 108 quilômetros por hora. Estes resultados iluminam o futuro promissor da robótica ágil, onde abordagens centradas na aprendizagem, como a RL, abrem caminho para um controle mais eficiente e desempenho em diversas aplicações.

A progressão visible mostra um drone de corrida rápida sendo controlado pela estratégia RL ao longo do tempo. Fonte.
Novos robôs macios, fortes e rígidos
Mudando nosso foco para o mundo da robótica suave, recentemente pesquisadores da Universidade Nacional Kangwon apresentaram um robô com pinça macia com a capacidade de variar sua rigidez, abordando um grande desafio no campo da robótica suave. Ao contrário de projetos complexos, esta pinça alcança variação de rigidez através de um mecanismo simples que envolve controle pneumático e tendões acionados por motores de passo. Essa inovação permite que a pinça se adapte a objetos de diversos formatos, tamanhos e pesos, ampliando seu potencial de aplicação. O estudo demonstra que esta pinça pode aumentar a sua rigidez em até 145% e suportar pesos de até 2.075 kg. A robótica suave, inspirada em organismos naturais, é promissora na saúde, na fabricação, na exploração e em outros campos, e esta pesquisa contribui para o seu avanço.
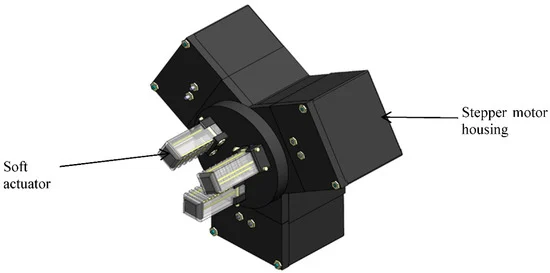
Projeto CAD do mecanismo de pinça. Fonte.
Robôs aprimorados para cirurgia cerebral
Voltando nosso foco para o mundo da robótica médica, pesquisadores da Harvard Medical Faculty desenvolveram um dispositivo robótico preparado para aprimorar a neurocirurgia, tornando-a menos invasiva. A equipe introduziu um novo robô endoscópico controlado por joystick de dois braços, projetado para imitar a destreza da cirurgia aberta, mas com incisões menores. Esta inovação foi posta à prova no contexto da ressecção de tumor cerebral, procedimento tipicamente invasivo. Em comparação com ferramentas endoscópicas manuais convencionais, o robô ofereceu maior acesso ao native cirúrgico, permitindo tarefas bimanuais sem compressão do tecido cerebral e, muitas vezes, concluindo as tarefas com mais rapidez. Essas descobertas abrem a porta para a potencial transformação de cirurgias cerebrais tradicionalmente abertas em procedimentos endoscópicos menos invasivos.
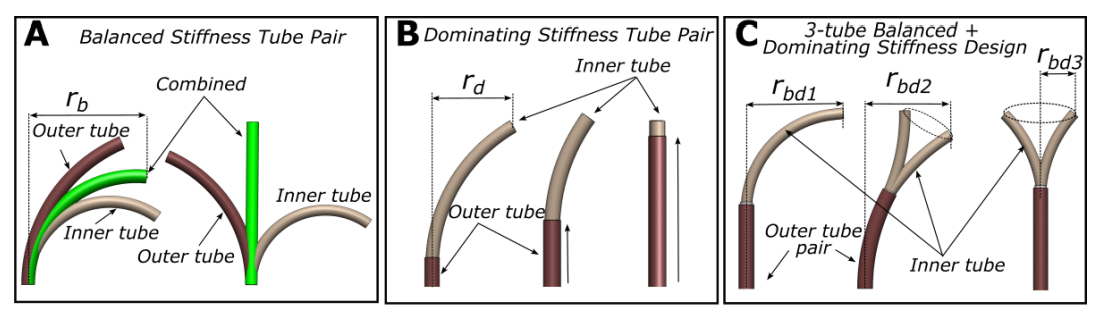
Braços tubulares robóticos com vários graus de rigidez. Fonte.
Uma agulha robótica avançada
Na mesma linha dos avanços da robótica médica, uma equipe de pesquisadores liderada pelo professor Ron Alterovitz da Universidade da Carolina do Norte em Chapel Hill desenvolveu uma agulha robótica autônoma projetada para navegar através do intrincado tecido pulmonar, evitando obstáculos e estruturas pulmonares importantes. A agulha usa IA e visão computacional para viajar de forma autônoma através de tecidos vivos, tornando-se uma ferramenta potencialmente valiosa para procedimentos médicos precisos, como biópsias e administração direcionada de medicamentos. Este desenvolvimento representa um passo significativo no campo da robótica médica, oferecendo maior precisão e segurança em procedimentos minimamente invasivos. Os pesquisadores planejam refinar ainda mais a tecnologia e explorar aplicações médicas adicionais.
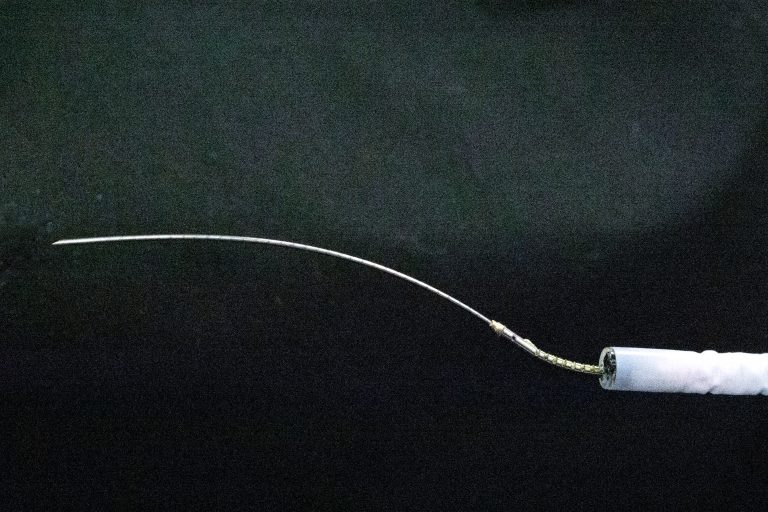
A agulha robótica emergindo de um broncoscópio. Fonte.
Os robôs poderiam abelha a chave para a pesquisa ecológica
Finalmente, no campo ecológico, a robótica pesquisadores da Universidade de Durham estão a associar-se a especialistas de diversas disciplinas para investigar como os animais se estão a adaptar aos desafios ecológicos, com o objectivo de mitigar a perda international de biodiversidade. Liderando o projeto RoboRoyale, o Dr. Farshad Arvin combina robótica em miniatura, inteligência synthetic e aprendizado de máquina para desenvolver abelhas robóticas. Essas abelhas robóticas são projetadas para interagir com as rainhas das abelhas, melhorando a postura de ovos e a produção de feromônios, o que influencia o comportamento da colmeia. Este projeto único centra-se exclusivamente nas abelhas rainhas, utilizando um sistema multi-robô que aprende ao longo do tempo como otimizar o seu bem-estar. Simultaneamente, o projeto MammalWeb recolhe imagens de armadilhas fotográficas para monitorizar os hábitos e comportamentos dos mamíferos do Reino Unido, abordando o impacto das alterações climáticas e das atividades humanas na biodiversidade. Estas iniciativas representam contribuições inovadoras da comunidade robótica para a investigação ecológica.
Um dispositivo de desenvolvimento robótico. Fonte.
A evolução contínua em vários setores sublinha a natureza adaptável e de progresso consistente da tecnologia robótica, revelando novas oportunidades para a sua integração em diversas indústrias. O crescimento gradual no campo da robótica reflete uma dedicação sustentada e fornece informações sobre as implicações potenciais destes desenvolvimentos para o futuro.
Fontes:
- Apraiz, A., Mulet Alberola, JA, Lasa, G., Mazmela, M., & Nguyen, HN (2023, 16 de agosto). Desenvolvimento de um novo conjunto de heurísticas para avaliação da interação humano-robô em ambientes industriais: Experiência em Robôs Heurísticos (HEUROBOX). Fronteiras.
- Xu, X., Wang, C., Xie, H., Wang, C., & Yang, H. (2023, 4 de setembro). Controle de loop duplo de robôs semelhantes a cobras acionados por cabo. MDPI.
- Music, Y., Romero, A., Matthias Müller, Koltun, V. e Davide Scaramuzza. (2023). Atingindo o limite em corridas autônomas: controle very best versus aprendizagem por reforço. Robótica Científica, 8(82).
- Mawah, SC e Park, Y.-J. (2023, 11 de setembro). Robô pneumático de garra macia de rigidez variável acionado por tendão. MDPI.
- Worth, Ok., Peine, J., Mencattelli, M., Yash Chitalia, Pu, D., Looi, T., Stone, S., Drake, JM, & Dupont, PE (2023). Usando a robótica para mover as mãos de um neurocirurgião até a ponta do endoscópio. Robótica Científica, 8(82).
- Robô médico autônomo conduz agulhas com sucesso através de tecidos vivos. (nd). Ciência da Computação. Recuperado em 23 de setembro de 2023
- Universidade, D. (sd). Pesquisa em Ciência da Computação para construir abelhas robóticas e monitorar mamíferos – Universidade de Durham. www.durham.ac.uk. Recuperado em 23 de setembro de 2023

Shaunak Kapur
faz parte da equipe de voluntariado do Robohub e está prestes a terminar o ensino médio (Texas). Shaun foi cativado pela robótica desde muito jovem.
Shaunak Kapur faz parte da equipe de voluntariado do Robohub e está prestes a terminar o ensino médio (Texas). Shaun foi cativado pela robótica desde muito jovem.