Se os mergulhadores usam BCDs infláveis (dispositivos de controle de flutuabilidade), por que os robôs subaquáticos não o fazem? Bem, um novo experimental faze afirma-se que a tecnologia é muito mais eficiente em termos energéticos do que os métodos tradicionais de subir e descer na água.
Normalmente, ROVs subaquáticos (veículos operados remotamente) e AUVs (veículos subaquáticos autônomos) são projetados para ter flutuabilidade neutra. Isso significa que eles não afundam nem flutuam para a superfície quando estão submersos.
Para se moverem verticalmente na coluna de água, eles normalmente usam seus poderosos propulsores elétricos. Utilizar uma bomba elétrica para puxar e retirar água dos tanques de lastro a bordo é outra opção. Em ambos os casos, uma quantidade considerável de energia da bateria é gasta no processo.
Buscando uma alternativa mais eficiente, a equipe de estudantes de engenharia BayMax da Rice College procurou células de combustível reversíveis que separam a água. Eles integraram quatro dos dispositivos em um ROV que eles próprios construíram, chamado Monarch.
As células de combustível de divisão de água utilizam o processo de eletrólise para dividir a água líquida em seus dois componentes, hidrogênio e oxigênio gasoso. As células reversíveis, como o próprio nome indica, também podem converter os dois gases novamente em líquido. Como os gases têm densidade menor que o líquido, eles têm quantity maior.
Este fenômeno é explorado pelo Monarca.
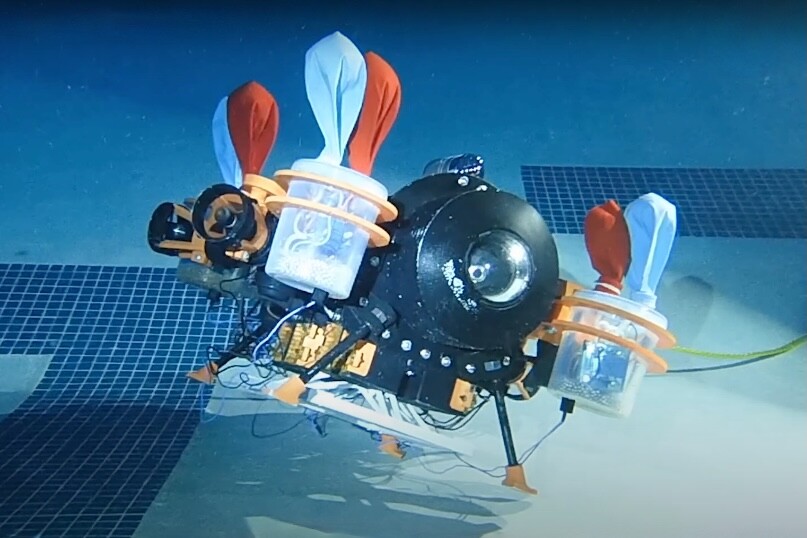
Jeff Fitlow/Universidade Rice
Se o ROV precisar aumentar sua flutuabilidade, a água líquida destilada em suas células de combustível é convertida em hidrogênio e oxigênio gasoso, que inflam balões localizados no topo de cada célula. Quando o veículo precisa diminuir a flutuabilidade, esses gases são convertidos novamente em líquido, fazendo com que os balões esvaziem.
A tecnologia também pode ser utilizada para manter a embarcação horizontalmente nivelada na água, ativando automaticamente células individuais conforme necessário. Além do mais, como a flutuabilidade mesmo de ROVs e AUVs flutuantes “neutros” muda em diferentes profundidades, ou em água doce versus água salgada, o sistema pode ser configurado para manter o veículo em qualquer profundidade.
Embora o processo de eletrólise use alguns eletricidade, ele precisa de consideravelmente menos do que seria necessário para subir ou descer utilizando propulsores. A eletricidade produzida pelas células de combustível poderia até ser usada para ajudar a alimentar o ROV.
Na verdade, em um artigo de 2023 que inspirou a equipe BayMax a criar o Monarch, cientistas da Rice College e da College of Houston afirmaram que o controle de profundidade habilitado por células de combustível poderia reduzir o consumo de energia dos AUVs em até 85% em comparação com propulsores tradicionais.
E mais, as células de combustível são consideradas mais leves e mais baratas que os propulsores verticais. Eles também são muito mais silenciosos, por isso são menos propensos a assustar a vida selvagem subaquática.
Jeff Fitlow/Universidade Rice
Escusado será dizer que, em aplicações do mundo actual, bexigas consideravelmente mais fortes poderiam ser utilizadas no lugar dos balões de borracha. A tecnologia de base também poderia ser usada em aplicações não aquáticas, como dispositivos assistivos vestíveis ou roupas robóticas.
“O authorized disso para nós é que é uma tecnologia realmente de ponta, é algo que nunca foi feito antes, exatamente da maneira que estamos fazendo”, diz Andrew Naked, membro do BayMax. “Somos os primeiros a implementar esta tecnologia em um dispositivo com pitch roll e controles extensos, por isso estamos muito entusiasmados com isso.”
Você pode ver o Monarca em ação no vídeo abaixo.
O projeto faz parte de um projeto colaborativo entre os laboratórios dos professores Fathi Ghorbel e Laura Schaefer da Rice College e o professor Zheng Chen da Universidade de Houston.
Robô subaquático é pioneiro em novo controle de flutuabilidade com eficiência energética
Fonte: Universidade do Arroz