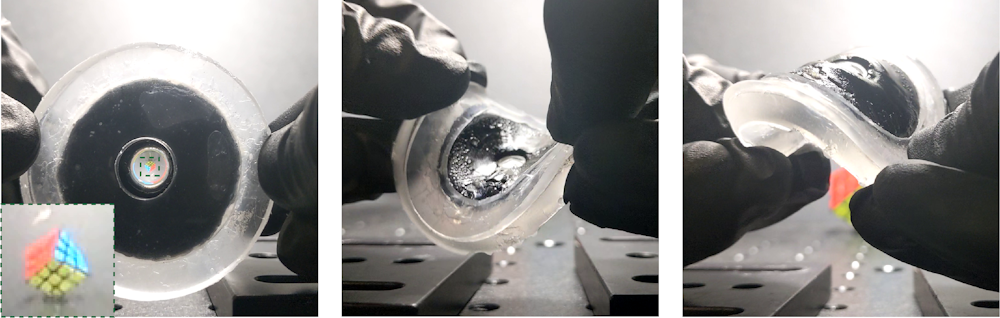
 Este disco de borracha é um olho synthetic que pode dar visão aos robôs macios. Crédito da imagem: Corey Zheng/Instituto de Tecnologia da Geórgia.
Este disco de borracha é um olho synthetic que pode dar visão aos robôs macios. Crédito da imagem: Corey Zheng/Instituto de Tecnologia da Geórgia.
Por Corey Zheng, Instituto de Tecnologia da Geórgia e Shu Jia, Instituto de Tecnologia da Geórgia
Inspirada no olho humano, nossa engenharia biomédica laboratório na Georgia Tech projetou um lente adaptativa feito de materiais macios, responsivos à luz e semelhantes a tecidos.
Os sistemas de câmeras ajustáveis geralmente exigem um conjunto de lentes sólidas, volumosas e móveis e uma pupila na frente de um chip da câmera para ajustar o foco e a intensidade. Em contraste, os olhos humanos desempenham essas mesmas funções utilizando tecidos moles e flexíveis de uma forma altamente compacta.
Nossa lente, chamada de lente macia de hidrogel foto-responsiva, ou PHySL, substitui componentes rígidos por polímeros macios que atuam como músculos artificiais. Os polímeros são compostos por hidrogel − um materials polimérico à base de água. Este músculo de hidrogel muda a forma de uma lente gelatinosa para alterar a distância focal da lente, um mecanismo análogo ao músculos ciliares no olho humano.
O materials hidrogel se contrai em resposta à luz, permitindo-nos controlar a lente sem tocá-la, projetando luz em sua superfície. Esta propriedade também nos permite controlar com precisão o formato da lente, iluminando seletivamente diferentes partes do hidrogel. Ao eliminar estruturas e ópticas rígidas, nosso sistema é flexível e compatível, tornando-o mais durável e seguro em contato com o corpo.
Por que isso importa
A visão synthetic usando câmeras é comum em uma variedade de sistemas tecnológicos, incluindo robôs e ferramentas médicas. A óptica necessária para formar um sistema visible ainda está tipicamente restrita a materiais rígidos que utilizam energia elétrica. Esta limitação representa um desafio para campos emergentes, incluindo robótica suave e ferramentas biomédicas que integram materiais macios em sistemas flexíveis, de baixo consumo de energia e autônomos. Nossa lente gelatinosa é particularmente adequada para esta tarefa.
Os robôs macios são máquinas feitas com materiais e estruturas compatíveis, inspirando-se nos animais. Essa flexibilidade adicional os torna mais duráveis e adaptáveis. Pesquisadores estão usando a tecnologia para desenvolver endoscópios cirúrgicospinças para manusear objetos delicados e robôs para navegando em ambientes que são difíceis para robôs rígidos.
Os mesmos princípios se aplicam às ferramentas biomédicas. Materiais semelhantes a tecidos podem suavizar a interface entre o corpo e a máquina, tornando as ferramentas biomédicas mais seguras, fazendo-as mover-se com o corpo. Estes incluem sensores vestíveis semelhantes à pele e implantes revestidos de hidrogel.
Que outras pesquisas estão sendo feitas neste campo
Este trabalho mescla conceitos de óptica ajustável e materiais macios e “inteligentes”. Embora esses materiais sejam frequentemente usados para criar atuadores suaves – peças de máquinas que se movem – como pinças ou propulsoressua aplicação em sistemas ópticos tem enfrentado desafios.
Muitos designs de lentes gelatinosas existentes dependem de bolsas ou atuadores cheios de líquido exigindo eletrônica. Esses fatores podem aumentar a complexidade ou limitar seu uso em sistemas delicados ou desprotegidos. Nosso design ativado por luz oferece uma alternativa mais simples e sem eletrônicos.
O que vem a seguir
Nosso objetivo é melhorar o desempenho do sistema usando avanços em materiais de hidrogel. Nova pesquisa produziu vários tipos de hidrogéis responsivos a estímulos com habilidades de contração mais rápidas e poderosas. Nosso objetivo é incorporar os mais recentes desenvolvimentos de materiais para melhorar as capacidades físicas das lentes gelatinosas de hidrogel foto-responsivas.
Pretendemos também mostrar seu uso prático em novos tipos de sistemas de câmeras. Em nosso trabalho atual, desenvolvemos uma câmera de prova de conceito, livre de eletrônicos, usando nossas lentes gelatinosas e uma câmera personalizada ativada por luz, chip microfluídico. Planejamos incorporar este sistema em um robô flexível para proporcionar-lhe uma visão livre de eletrônicos. Este sistema seria uma demonstração significativa do potencial do nosso projeto para permitir novos tipos de detecção visible suave.
O Resumo de pesquisa é uma breve visão de um trabalho acadêmico interessante.![]()
Corey ZhengDoutorando em Engenharia Biomédica, Instituto de Tecnologia da Geórgia e Shu JiaProfessor Assistente de Engenharia Biomédica, Instituto de Tecnologia da Geórgia
Este artigo foi republicado de A conversa sob uma licença Artistic Commons. Leia o artigo authentic.
![]()
A conversa
é uma fonte independente de notícias e opiniões, proveniente da comunidade acadêmica e de pesquisa e entregue diretamente ao público.
![]()
The Dialog é uma fonte independente de notícias e opiniões, proveniente da comunidade acadêmica e de pesquisa e entregue diretamente ao público.